DX-COM 模型编译器
介绍
DX-COM (模型编译器) 可根据提供的 ONNX 模型和配置文件生成 NPU 指令集,将 ONNX 模型编译成在 NPU 上可执行的 DXNN 模型文件格式,DXNN 文件包含生成的指令集和权重信息。
系统要求
| CPU | x86(x64) |
|---|---|
| 内存(RAM) | ≥ 16GB |
| 存储空间 | ≥ 8GB |
| 操作系统 | Ubuntu 18.04、20.04、22.04(x64) |
| LDD 版本 | ≥ 2.28 |
安装方法
安装所需的库
- libgl1-mesa-glx
- libglib2.0-0
使用以下命令安装所需的库。
sudo apt-get install -y --no-install-recommends libgl1-mesa-glx libglib2.0-0 make
下载 DX-COM 安装包
请在 DX-M1 / DX-M1M SDK 资源下载页面下载 DX-COM 安装包并解压
DEEPX Developers 开放对外注册,用户自行注册登录后即可在 S/W Download 上下载所有 SDK 软件
tar -xvf dx_com_M1_v2.1.0.tar.gz
使用方法
模型配置
编译模型使用的参数需要在 json 文件中进行配置。
模型输入配置
设置 ONNX 模型输入层的名字和模型输入形状。
inputs : ONNX input name shape info
示例:
{
"inputs": {
"input.1": [ # ONNX input's name
1, # Batch Size(MUST BE SET AS 1)
3, # ONNX input's shape
512,
512
]
}
模型校准配置
设置校准方法的参数。
calibration_num:用于校准的图像数量
如果希望尽量减少模型精度的下降,建议尝试不同的 calibration_num 值。你可以使用不同的设置(如 calibration_num=1、5、10、100 或 1000)来编译模型,测量每种设置下的精度,并选择精度最高的值。
calibration_method:校准方法
可选项:["ema", "minmax"]
在大多数情况下,"ema" 能提供更好的精度,但某些情况使用 "minmax" 效果更佳。
示例:
...
"calibration_num": 100,
"calibration_method": "ema",
...
数据加载配置
设置校准数据集的参数。建议选择用于训练或推理的同一批数据进行校准。
-
dataset_path:校准数据集的根目录路径(会递归搜索文件)。
-
file_extensions:目标图像的文件扩展名。
-
preprocessings:图像预处理方法。
示例:
...
"default_loader": {
"dataset_path": "/datasets/ILSVRC2012/",
"file_extensions": [
"jpeg",
"jpg",
"png",
"JPEG"
],
"preprocessings":
[
...continued in next step...
]
}
...
输入图像预处理配置
图像输入到 ONNX 模型之前所需的预处理流程。这些配置用于模型编译期间对校准数据集进行预处理。 其中带 (*) 的项将在 NPU 侧执行,从而减轻 CPU 的处理负担。因此,这些迁移到 NPU 的预处理操作,在运行时软件中应被省略。如果不需要预处理,则本节可以跳过。
| 预处理项 | 参数/子选项 | 说明 | 示例 |
|---|---|---|---|
convertColor | RGB2BGR, BGR2RGB, BGR2GRAY, BGR2YCrCb | 转换颜色通道顺序 | "RGB2BGR" |
resize | mode | default (opencv) 或 torchvision | "default" / "torchvision" |
width, height | 目标图像尺寸(仅 default 模式) | width: 224, height: 224 | |
size | 目标短边尺寸 (仅 torchvision 模式) | size: 256 | |
interpolation | 插值方式(可选)default 模式可选: "NEAREST", "LINEAR"(default), "AREA", "CUBIC", "LANCZOS4" torchviion 模式可选: "NEAREST", "LANCZOS", "BILINEAR"(default), "BICUBIC", "BOX", "HAMMING" | LINEAR, BILINEAR | |
centercrop | width, height | 从图像中心裁剪指定尺寸 | width: 224, height: 224 |
transpose | axis | 维度变换顺序 | [2, 0, 1] |
normalize (*) | mean, std | 归一化处理,支持单值或数组 | [0.5,0.5,0.5] |
mul (*) | x | 所有像素乘以某个值 | x: 255 |
add (*) | x | 所有像素加上某个值 | x: 0.1 |
subtract (*) | x | 所有像素减去某个值 | x: 0.1 |
div (*) | x | 所有像素除以某个值 | x: 255.0 |
expandDim | axis | 在指定位置扩展一个维度 | axis: 0 |
其中带 (*) 的项将在 NPU 侧执行
模型配置示例
"preprocessings": [ # Set pre-processings for Inference in order.
{
"convertColor": {
"form": "BGR2RGB" # Color Converter Format
}
},
{
"resize": { # Resize Size
"mode": "default", # can be omitted (default)
"width": 380,
"height": 380 # this resize makes image shape into (380, 380, 3)
}
},
{
"centercrop": { # Center crop the image
"width": 320,
"height": 320 # this centercrop makes image shape into (320, 320, 3)
}
},
{
"div": { # Division parameter
"x": 255
}
},
{
"normalize": { # mean, std for Normalization.
"mean": [ # Dimension: 3D or single Value
0.486, # 3D: [0.486, 0.456, 0.406]
0.456, # single Value: [0.456] or 0.456
0.406
],
"std": [
0.229,
0.224,
0.225
]
}
},
{
"transpose": { # Transpose(permute) Axis Parameter
"axis": [ # ex) HWC -> CHW : [2,0,1]
2,
0,
1
]
}
},
{
"expandDim": { # Expand Dimension
"axis": 0
}
}
]
精度增强方案配置
为了进一步提升模型精度,可选择使用增强精度方案(Enhanced Scheme),方案名称为 DXQ-P0 ~ DXQ-P5。
- 各增强方案彼此独立,即可以同时启用多个方案。
- 使用这些方案不一定总能带来精度提升,建议根据实际情况评估效果;
- 在 CPU-only 环境下启用这些方案会显著增加编译时间。
| 方案编号 | 名称 | 参数说明 |
|---|---|---|
| DXQ-P0 | 融合操作(Fusing) | alpha:融合比率,取值范围 0 < alpha < 1.0,推荐值:0.5 |
| DXQ-P1 | 寻找最优参数 | true/false,启用将显著增加 CPU 编译时间 |
| DXQ-P2 | 放宽校准范围寻找最优参数 | alpha:校准范围最小值比例,0 < alpha < beta,推荐值:0.1, beta:校准范围最大值比例,alpha < beta < ∞,推荐值:1.0 |
| DXQ-P3 | 参数微调(方法一) | num_samples:用于校准的数据样本数量,0 < num_samples < ∞,推荐值:1024 |
| DXQ-P4 | 参数微调(方法二) | 同 DXQ-P3 |
| DXQ-P5 | 参数微调(方法三) | 同 DXQ-P3 |
DXQ-P3、DXQ-P4、DXQ-P5 虽然参数相同,但使用的是不同的微调方法。
精度增强配置例子
'''
"enhanced_scheme": {
"DXQ-P0": {
"alpha": 0.5
},
"DXQ-P1": true,
"DXQ-P2": {
"alpha": 0.1,
"beta": 1,
"cosim_num": 2
},
"DXQ-P3": {
"num_samples": 1024
},
"DXQ-P4": {
"num_samples": 1024
},
"DXQ-P5": {
"num_samples": 1024
}
},
}
精度增强单度控制配置例子
'''
"enhanced_scheme": {
"DXQ-P0": false, # this line can be remove for not using 'DXQ-P0' scheme
"DXQ-P1": false,
"DXQ-P2": false,
"DXQ-P3": true, # only 'DXQ-P3' scheme works
"DXQ-P4": false,
"DXQ-P5": false
},
'''
| 名称 | 编译速度 | 精度提升倾向 |
|---|---|---|
| DXQ-P0 | 非常快 | 低 |
| DXQ-P1 | 快 | 低-中 |
| DXQ-P2 | 较慢 | 中-高 |
| DXQ-P3 | 非常慢 | 高 |
| DXQ-P4 | 非常慢 | 高 |
| DXQ-P5 | 非常慢 | 高 |
PPU 后处理加速
PPU (Post-Processing Unit) 是为目标检测模型提供硬件加速的后处理功能。如目标模型是 YOLO 系列的模型架构,可以在模型编译配置文件中加入 PPU 配置参数。
支持 PPU 类型
支持 PPU 的目标检测模型架构有两种
-
Type 0 (Anchor-Based YOLO)
专为使用锚框的模型而设计,例如 YOLOv3、YOLOv4、 YOLOv5 和 YOLOv7。
-
Type 1 (Anchor-Free YOLO)
专为无锚模型设计,例如 YOLOX。
判断可使用 PPU 的 ONNX 模型节点
- Type 0
- Type 1
从模型输出反向确认,找到 Conv 输出形状为 [1, num_anchors*(5+num_classes), H, W] 的输出头。这些 Conv 之后通常会进行reshape、permute和其他后处理操作。
这里以 yolo5s.onnx 为例子, yolov5s 的 num_anchors 为 3, num_classes 为 80, 这里要找的是 [1, 255, H, W] 特征的 Conv 节点,
从模型输出反向寻找,可以确定这三个 Conv 节点位置,分别为 Conv_196、 Conv_308、 Conv_420, 将这个三个 Conv 节点名称配置到模型编译配置文件中的 PPU 部分。
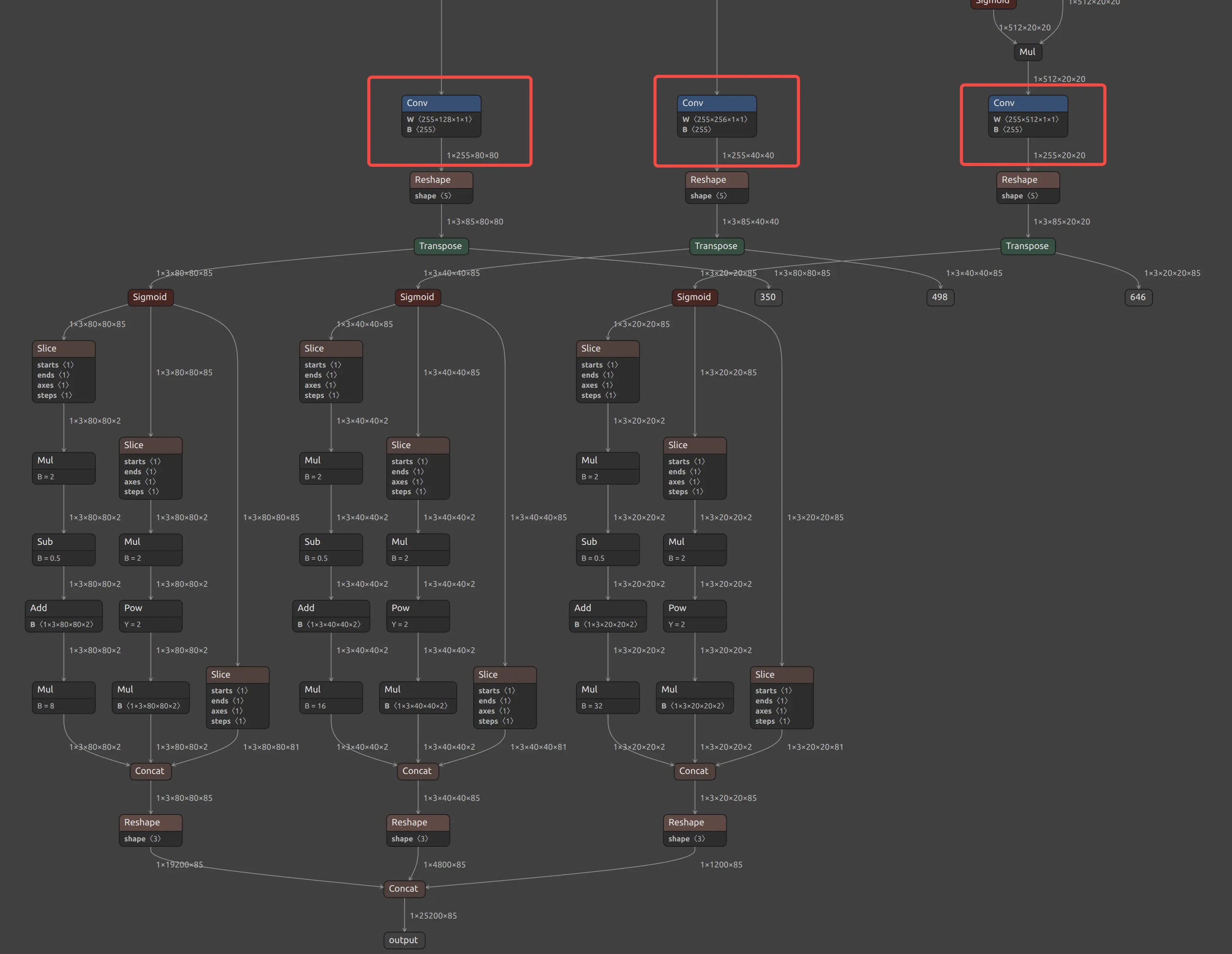
Yolov5s PPU Conv node
'''
"ppu": {
"type":0,
"conf_thres":0.25,
"activation": "Sigmoid",
"num_classes": 80,
"layer": {
"Conv_196": {
"num_anchors": 3
},
"Conv_308": {
"num_anchors": 3
},
"Conv_420": {
"num_anchors": 3
}
}
},
'''
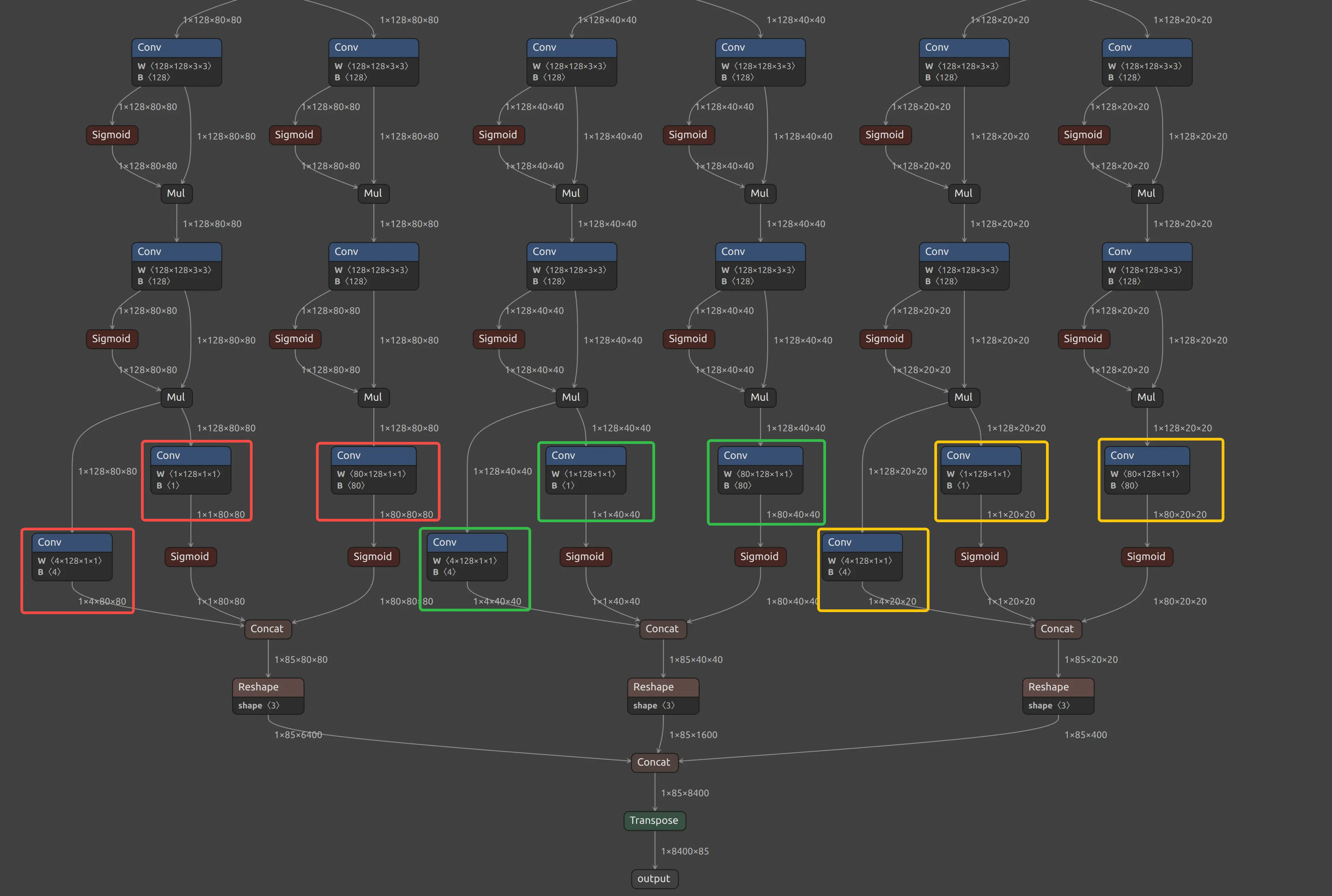
从模型输出反向确认,针对每个检测大小,找到三种类型的 Conv 节点。分别为 bbox, obj_conf, cls_conf
-
bbox输出边界框回归值的卷积层 [1,4,H,W] -
obj_conf输出目标置信度分数的卷积层 [1,1,H,W] -
cls_conf输出类别预测分数的卷积层 [1,80,HW]
这里以 YOLOXS-1.onnx 为例子, YOLOXS 有三种 scale, 这里要找的是 bbox, obj_conf, cls_conf 一共九个 Conv 节点,
从模型输出反向寻找,可以确定这9个 Conv 节点位置,分别为以下 9 个 Conv 节点, 将这 9 个节点名称配置到模型编译配置文件中的 PPU 部分。
Yolov5s PPU Conv node
'''
"ppu": {
"type":1,
"conf_thres":0.25,
"num_classes": 80,
"layer": [
{
"bbox": "Conv_261",
"obj_conf": "Conv_262",
"cls_conf": "Conv_254"
},
{
"bbox": "Conv_282",
"obj_conf": "Conv_283",
"cls_conf": "Conv_275"
},
{
"bbox": "Conv_303",
"obj_conf": "Conv_304",
"cls_conf": "Conv_296"
}
]
},
'''
参数说明
| 参数名 | 类型 | 说明 |
|---|---|---|
type | int | 模型类型标识。设置为 1 表示 Anchor-Free YOLO 模型 |
conf_thres | float | 检测结果过滤的置信度阈值。 注意:该值在模型编译阶段固定,运行时不可修改。 |
num_classes | int | 模型支持的检测类别数量 |
layer | list | 检测层配置列表,每个元素对应一个检测头,包含以下字段: |
layer.bbox | string | 输出**边界框坐标(Bounding Box)**的层名称 |
layer.obj_conf | string | 输出**目标置信度(Object Confidence)**的层名称 |
layer.cls_conf | string | 输出**分类置信度(Class Confidence)**的层名称 |
执行模型编译
当完成模型配置文件后使用以下命令进行模型编译
dx_com -m <MODEL_PATH> -c <CONFIG_PATH> -o <OUTPUT_DIR>
-m or --model_path <MODEL_PATH>: Path to Onnx Model[*.onnx]
-c or --config_path <CONFIG_PATH>: Path to Model Config[*.json]
-o or –output_dir <OUTPUT_PATH>: Path to Output Data Save Directory
(optional) --shrink : only including compiled model to run NPU
编译例子
dx-com 下的 sample 目录下有多个模型的编译配置文件例子
$./dx_com/dx_com \
-m sample/MobilenetV1.onnx \
-c sample/MobilenetV1.json \
-o output/mobilenetv1
# shrink option
$./dx_com/dx_com \
-m sample/MobilenetV1.onnx \
-c sample/MobilenetV1.json \
-o output/mobilenetv1 \
--shrink
DX-COM 只支持 1 batchsize 的模型输入,如果模型输入是 (batchsize,C,H,W) 或 (batchsize,H,W,C) 请确保 batchsize 为 1
编译成功后 dxnn 格式模型保存在 output/mobilenetv1 文件夹中。
DX-COM 文档构建
更多关于 DX-COM 的使用方法,请构建详细文档查阅
克隆 DX-ALL-SUITE 仓库
请按照 DX-ALL-SUITE 克隆指定版本的 DX-ALL-SUITE 仓库
安装 MkDocs
pip install mkdocs mkdocs-material mkdocs-video pymdown-extensions mkdocs-with-pdf markdown-grid-tables
构建文档
cd dx-all-suite/dx-compiler
mkdocs build
构建完成后会在当前目录下生成 DEEPX_DX-COM_UM_v2.1.0_Nov_2025.pdf
启动文档服务
可以使用浏览器访问网页文档
mkdocs serve