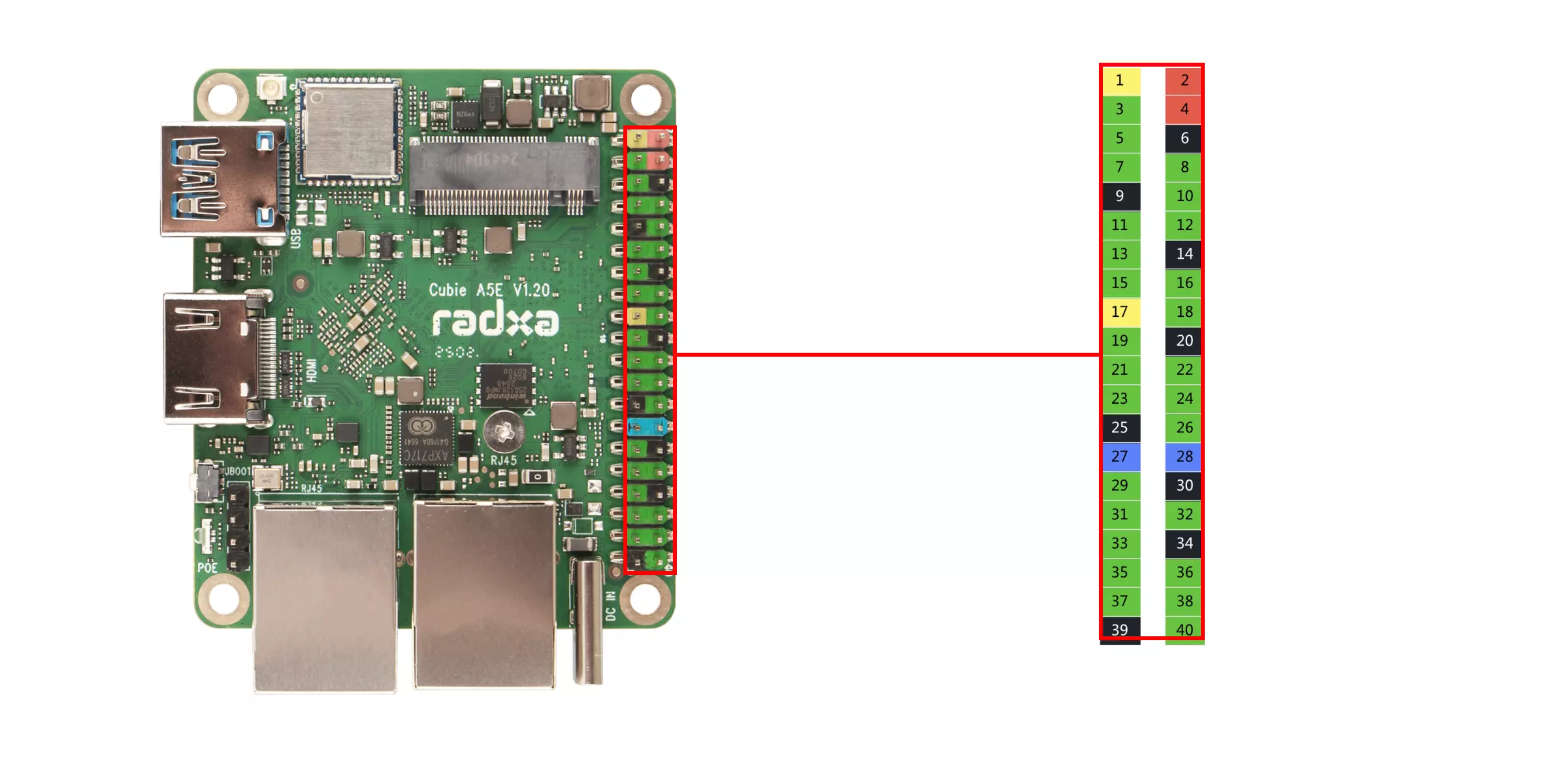
40 Pin GPIO 接口
瑞莎 Cubie A5E 板载 40 Pin GPIO(通用输入输出)接口,为硬件扩展提供了高度灵活的接口支持。
用户可以通过 40 Pin GPIO 接口连接各类传感器、执行器、通信模块、显示屏以及其他嵌入式外设,从而快速实现物联网(IoT)、机器人控制、工业自动化等领域的原型开发与功能验证。
使用 40 Pin GPIO 接口时,请注意引脚和外设的接线,请确保引脚连接正确,不当操作可能导致设备硬件损坏。
GPIO 功能
Cubie A5E 支持给板载的 GPIO 引脚外接外部设备,支持 UART、SPI、I2C、ADC 等。
| Function7 | Function6 | Function5 | Function4 | Function3 | Function2 | Function1 | Pin# | Pin# | Function1 | Function2 | Function3 | Function4 | Function5 | Function6 | Function7 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| +3.3V | 1 | 2 | +5.0V | ||||||||||||
| PB-EINT5 | HDMI-SDA | PWM0-9 | TRACE-CLK | I2S0-BCLK | TWI1-SDA | PB5 | 3 | 4 | +5.0V | ||||||
| PB-EINT4 | HDMI-SCL | PWM0-8 | TRACE-DATA2 | I2S0-MCLK | TWI1-SCK | PB4 | 5 | 6 | GND | ||||||
| PI-EINT7 | SPI2-CLK | PWM0-8 | UART4-CTS | UART6-RX | PI7 | 7 | 8 | PB9 | UARTO-TX | TWIO-SCK | TRACE-DATA1 | I2S0-DIN2 | I2S0-DOUBT2 | PB-EINT9 | |
| GND | 9 | 10 | PB10 | UARTO-RX | TWIO-SDA | PWM0-1 | I2S0-DIN3 | I2S0-DOUBT3 | PB-EINT10 | ||||||
| PI-EINT9 | PWM0-10 | DMIC-DATA2 | TWI5-SDA | PI9 | 11 | 12 | PI2 | UART5-TX | SPI1-CSO | PWM0-3 | I2S2-BCLK | I2S2-BCLK | PI-EINT2 | ||
| PI-EINT10 | I2S2-MCLK | PWM0-11 | DMIC-DATA1 | OWA-OUT | PI10 | 13 | 14 | GND | |||||||
| S-PL-EINT12 | S-SPI0-MOSI | DMIC-DATA2 | S-UART0-TX | MCU-PWM0-6 | S-TWI2-SCK | PL12 | 15 | 16 | PI11 | UART3-TX | DMIC-DATA0 | PWM0-12 | PI-EINT11 | ||
| +3.3V | 17 | 18 | PI14 | UART6-RTS | DMIC-CLK | PWM0-15 | PI-EINT14 | ||||||||
| SPI1-MOSI | PI-EINT13 | PWM0-4 | UART7-TX | TWI4-SCK | PB13 | 19 | 20 | GND | |||||||
| PB-EINT14 | PWM0-5 | SPI1-MISO | UART7-RX | TWI4-SDA | PB14 | 21 | 22 | PL13 | S-TWI2-SDA | MCU-PWM0-7 | S-UARTO-RX | DMIC-DATA3 | S-SPI-MISO | S-PL-EINT13 | |
| PB-EINT12 | PWM0-3 | SPI1-CLK | UART7-CTS | TWI5-SDA | PB12 | 23 | 24 | PB11 | TWI5-SCK | UART7-RTS | PWM0-2 | SPI1-CSO | PB-EINT11 | ||
| GND | 25 | 26 | PI0 | TWI4-SCK | UART4-TX | PWM0-1 | I2S2-DIN3 | I2S2-DOUBT3 | PI-EINTO | ||||||
| (USB2-DM) | PI-EINT16 | PWM1-1 | TWI2-SDA | UART3-CTS | PI16 | 27 | 28 | PI15 | TWI2-SCK | UART3-RTS | PWM1-0 | PI-EINT15 | (USB2-DM) | ||
| PI-EINT8 | SPI2-MOSI | PWM0-9 | IR-RX | TWI5-SCK | PI8 | 29 | 30 | GND | |||||||
| PI-EINT12 | SPI2-MISO | PWM0-13 | UART3-RX | PI12 | 31 | 32 | PI1 | TWI4-SDA | UART4-RX | PWM0-2 | I2S2-DIN2 | I2S2-DOUBT2 | PI-EINT1 | ||
| PI-EINT6 | SPI2-CSO | PWM0-7 | UART6-TX | UART4-RTS | PI6 | 33 | 34 | GND | |||||||
| PI-EINT13 | I2S2-MCLK | PWM0-14 | DMIC-DATA3 | UART6-CTS | PI13 | 35 | 36 | PI3 | UART5-RX | PWM0-4 | I2S2-LRCK | SPI1-CLK | PI-EINT3 | ||
| GPADC2 | 37 | 38 | PI5 | UART5-CTS | SPI1-MISO | PWM0-6 | I2S2-DINO | I2S2-DOUBT1 | PI-EINT5 | ||||||
| GND | 39 | 40 | PI4 | UART5-RTS | SPI1-MOSI | PWM0-5 | I2S2-DOUBT0 | I2S2-DIN1 | PI-EINT4 |
GPIO 引脚号
控制指定引脚,你想需要根据以下公式来计算引脚号:
| GPIO 芯片 | 引脚号 | 计算公式 |
|---|---|---|
| GPIOCHIP1 | A ~ K | NUM + 32 * (A ~ K) |
| GPIOCHIP0 | L ~ | NUM + 32 * (L ~ ) |
计算示例:
- PI4
GPIOCHIP1 -> 4 + 32 * (A ~ K) -> 4 + 32 * 8 -> 260
GPIO 使用
通过板载的 40-Pin GPIO 接口,演示常见的 GPIO 使用方法。
安装 python-periphery
使用 python-periphery 库来控制 GPIO 引脚。
sudo pip3 install python-periphery
GPIO 读取
硬件准备
- 主板
- 杜邦线
软件准备
测试代码
以下代码是使用 python-periphery 库来读取 PI4 引脚的高低电平。
gpio_input.py
from periphery import GPIO
import time
def read_gpio_input():
# Configure GPIO input (modify pin number according to actual hardware)
# Using pin 260 of /dev/gpiochip1 here (corresponds to PI4)
try:
# Initialize GPIO in input mode
gpio_in = GPIO("/dev/gpiochip1", 260, "in")
print("Starting GPIO input reading (press Ctrl+C to exit)")
while True:
# Read pin value
value = gpio_in.read()
print(f"GPIO input value: {value} (True=High, False=Low)")
time.sleep(1) # Read once per second
except KeyboardInterrupt:
print("\nProgram exited")
except Exception as e:
print(f"Error occurred: {e}")
finally:
# Ensure resources are released
try:
gpio_in.close()
except:
pass
if __name__ == "__main__":
read_gpio_input()
测试步骤
-
将 PI4 引脚接 GND 或 3.3V 引脚
-
将代码保存为
gpio_input.py -
使用
sudo python3 gpio_input.py命令运行测试代码
实验现象
终端会输出 False 或 True 信息。
False 代表低电平,True 代表高电平。
GPIO 输出
硬件准备
- 主板
- 杜邦线
软件准备
测试代码
以下代码是使用 python-periphery 库来控制 PI4 引脚输出高低电平,然后通过 PI5 引脚读取 PI4 引脚的高低电平。
gpio_output.py
from periphery import GPIO
import time
def gpio_output_with_feedback():
# GPIO Configuration (modify pin numbers based on your hardware)
# PI4 (output) → maps to pin 260 of /dev/gpiochip1
# PI5 (input) → maps to pin 261 of /dev/gpiochip1
OUTPUT_PIN_CHIP = "/dev/gpiochip1"
OUTPUT_PIN_NUMBER = 260 # PI4 (output pin, controlled by the script)
INPUT_PIN_NUMBER = 261 # PI5 (input pin, reads PI4's output state)
# Initialize GPIO objects as None first (for safe release later)
gpio_out = None
gpio_in = None
try:
# Initialize PI4 as OUTPUT mode
gpio_out = GPIO(OUTPUT_PIN_CHIP, OUTPUT_PIN_NUMBER, "out")
# Initialize PI5 as INPUT mode
gpio_in = GPIO(OUTPUT_PIN_CHIP, INPUT_PIN_NUMBER, "in")
# Print test initialization info
print("=== GPIO Output-Input Feedback Test Started ===")
print(f"Controlled Pin (PI4): {OUTPUT_PIN_CHIP} - Pin {OUTPUT_PIN_NUMBER} (OUTPUT)")
print(f"Monitoring Pin (PI5): {OUTPUT_PIN_CHIP} - Pin {INPUT_PIN_NUMBER} (INPUT)")
print("Test Behavior: PI4 toggles HIGH/LOW every 1s; PI5 verifies PI4's state")
print("Press Ctrl+C to stop the test\n")
# Main loop: Toggle PI4 and read PI5 feedback
while True:
# 1. Set PI4 to HIGH level
gpio_out.write(True)
time.sleep(0.1) # Short delay for signal stabilization (avoid read lag)
pi5_reading = gpio_in.read()
print(f"PI4 Output: HIGH (True) | PI5 Reading: {pi5_reading}")
# Keep PI4 HIGH for 1 second
time.sleep(1)
# 2. Set PI4 to LOW level
gpio_out.write(False)
time.sleep(0.1) # Short delay for signal stabilization
pi5_reading = gpio_in.read()
print(f"PI4 Output: LOW (False) | PI5 Reading: {pi5_reading}")
# Keep PI4 LOW for 1 second
time.sleep(1)
# Handle user-initiated exit (Ctrl+C)
except KeyboardInterrupt:
print("\n\nTest stopped by user (Ctrl+C)")
# Handle other unexpected errors (e.g., GPIO access failure)
except Exception as e:
print(f"\nError during test: {str(e)}")
# Ensure GPIO resources are released even if an error occurs
finally:
print("\nReleasing GPIO resources...")
# Safely close PI4 (set to LOW first to avoid residual high level)
if gpio_out:
try:
gpio_out.write(False)
gpio_out.close()
print(f"Successfully closed PI4 (Pin {OUTPUT_PIN_NUMBER})")
except Exception as close_err:
print(f"Failed to close PI4 (Pin {OUTPUT_PIN_NUMBER}): {str(close_err)}")
# Safely close PI5
if gpio_in:
try:
gpio_in.close()
print(f"Successfully closed PI5 (Pin {INPUT_PIN_NUMBER})")
except Exception as close_err:
print(f"Failed to close PI5 (Pin {INPUT_PIN_NUMBER}): {str(close_err)}")
print("Resource release complete.")
# Run the test when the script is executed directly
if __name__ == "__main__":
gpio_output_with_feedback()
测试步骤
-
将 PI4 引脚和 PI5 引脚进行短接
-
将代码保存为
gpio_output.py -
使用
sudo python3 gpio_output.py命令运行测试代码
实验现象
终端会输出 False 或 True 信息。
False 代表低电平,True 代表高电平。
PWM 输出
硬件准备
- 主板
- LED
- 杜邦线
软件准备
测试代码
以下代码是使用 python-periphery 库来测试 PWM 输出。
pwm_output.py
from periphery import PWM
import time
def pwm_test():
try:
# Configure PWM parameters - modify according to your hardware
# Common PWM paths: /sys/class/pwm/pwmchip0/pwm0, etc.
PWM_CHIP = 0 # PWM chip number
PWM_CHANNEL = 7 # PWM channel number
# Initialize PWM
pwm = PWM(PWM_CHIP, PWM_CHANNEL)
print(f"PWM Test: Using PWM{PWM_CHIP}.{PWM_CHANNEL} (Pin: PI6)")
# Set PWM frequency to 1kHz
frequency = 1000 # 1000 Hz
pwm.frequency = frequency
print(f" Set frequency: {frequency} Hz")
# Enable PWM output
pwm.enable()
print(" PWM enabled")
# Test different duty cycles (0% to 100%)
duty_cycles = [0.0, 0.25, 0.5, 0.75, 1.0]
for duty in duty_cycles:
pwm.duty_cycle = duty
print(f" Set duty cycle: {duty*100:.1f}%")
time.sleep(1) # Maintain current duty cycle for 1 second
# Cleanup
pwm.disable()
pwm.close()
print(" PWM disabled and closed")
print("PWM Test completed successfully")
except Exception as e:
print(f"PWM Test failed: {e}")
if __name__ == "__main__":
print("Starting PWM Signal Test...\n")
pwm_test()
测试步骤
-
进入
rsetup的Overlay->Manage overlays勾选Enable PWM0-7选项,勾选后重启系统 -
将 LED 的正极连接到 PI6 引脚
-
将 LED 的负极连接到 GND 引脚
-
将代码保存为
pwm_output.py -
使用
sudo python3 pwm_output.py命令运行测试代码
实验现象
外接的 LED 会以不同的亮度闪烁,从亮到暗变化。
UART 使用
UART(通用异步收发传输器) 是一种广泛使用的串行通信协议,用于在嵌入式系统、计算机和外设之间进行异步串行数据传输。
硬件准备
- 主板
- 杜邦线
软件准备
测试代码
以下代码是使用 python-periphery 库来测试 UART4 回环通信。
uart_example.py
from periphery import Serial
import time
def uart_test():
try:
# Modify the serial device path according to your hardware, common paths include /dev/ttyS0, /dev/ttyS1, /dev/ttyUSB0, etc.
# PI11(TX) PI31(RX)
UART_DEVICE = "/dev/ttyAS3"
BAUDRATE = 115200
# Initialize serial port
serial = Serial(UART_DEVICE, BAUDRATE)
print(f"UART Test: Opening serial port {UART_DEVICE}, baud rate {BAUDRATE}")
# Send test data
test_message = "Hello, UART Test!\n"
serial.write(test_message.encode())
print(f" Sent data: {test_message.strip()}")
# Wait for data transmission
time.sleep(0.1)
# Try to read data (if loopback or other device responds)
if serial.input_waiting() > 0:
received_data = serial.read(serial.input_waiting())
print(f" Received data: {received_data.decode().strip()}")
else:
print(" No data received (normal unless loopback is connected)")
serial.close()
print("UART test completed")
except Exception as e:
print(f"UART test failed: {e}")
if __name__ == "__main__":
uart_test()
测试步骤
-
进入
rsetup的Overlay->Manage overlays勾选Enable UART3选项,勾选后重启系统 -
将 PI11 引脚和 PI31 引脚短接
-
将代码保存为
uart_example.py -
使用
sudo python3 uart_example.py命令运行测试代码
实验现象
终端会输出发送和接收的信息,可以根据终端输出的信息判断 UART 回环测试是否成功。
I2C 使用
I2C 是一种广泛使用的同步串行通信协议,由飞利浦(现恩智浦)开发,主要用于短距离芯片间通信。
硬件准备
- 主板
- I2C 设备(如 OLED 显示屏,其对应的 I2C 地址为 0x3C)
- 杜邦线
软件准备
测试代码
以下代码是使用 python-periphery 库来测试 I2C 通信。
i2c_example.py
from periphery import I2C
def i2c_device_detection():
"""I2C Test - Check if device exists
Pin reference: PB5 (SDA), PB4 (SCL)
"""
# Modify according to your hardware connection
# Common I2C bus devices: /dev/i2c-0, etc.
I2C_BUS = "/dev/i2c-1"
TARGET_ADDR = 0x3C # Target address to check
i2c = None # Initialize I2C object reference
try:
# Initialize I2C object
i2c = I2C(I2C_BUS)
# Attempt a simple read/write operation to detect device
# Sending a single 0x00 byte as test communication
msgs = [I2C.Message([0x00])]
i2c.transfer(TARGET_ADDR, msgs)
print(f"I2C Test: Device found at address 0x{TARGET_ADDR:02X}")
return True
except Exception as e:
# Exception (e.g., IOError) usually indicates no device or no response
print(f"I2C Test: No device or no response at address 0x{TARGET_ADDR:02X}: {e}")
return False
finally:
# Ensure I2C resources are released
if i2c is not None:
try:
i2c.close()
except:
pass
if __name__ == "__main__":
print("Starting I2C Device Detection...")
i2c_device_detection()
print("I2C Test completed")
测试步骤
-
进入
rsetup的Overlay->Manage overlays勾选Enable TWI1选项,勾选后重启系统 -
将 OLED 显示屏的 SCL 引脚连接到 PB4 引脚,SDA 引脚连接到 PB5 引脚,VCC 连接到 5V,GND 连接到 GND
-
将代码保存为
i2c_example.py -
使用
sudo python3 i2c_example.py命令运行测试代码
实验现象
脚本功能是检查指定 I2C 总线上的特定地址是否存在可响应的 I2C 设备,可以判断 I2C 设备是否正常工作。
SPI 使用
SPI(串行外设接口)是一种高速、全双工、同步串行通信协议,由 Motorola(现为 NXP )开发,主要用于短距离芯片间通信,常见于传感器、存储器(如 Flash )、显示屏等设备与微控制器之间的数据传输。
硬件准备
- 主板
- 杜邦线
软件准备
测试代码
以下代码是使用 python-periphery 库来测试 SPI 回环通信。
spi_example.py
from periphery import SPI
def spi_communication_test():
# Data to be transmitted (4 bytes)
transmit_data = [0xAA, 0xBB, 0xCC, 0xDD]
try:
# Initialize SPI resource
# Parameters: SPI device path, mode 0, 1MHz clock frequency
spi = SPI("/dev/spidev1.0", 0, 1000000)
# Transmit data and receive response simultaneously
# SPI is full-duplex, so data is sent and received at the same time
received_data = spi.transfer(transmit_data)
# Print test results
print("SPI Test:")
print(" Transmitted data: [0x{:02x}, 0x{:02x}, 0x{:02x}, 0x{:02x}]".format(*transmit_data))
print(" Received data: [0x{:02x}, 0x{:02x}, 0x{:02x}, 0x{:02x}]".format(*received_data))
except Exception as e:
print(f"SPI Test failed: {e}")
finally:
# Ensure SPI resource is released
try:
spi.close()
except:
pass
if __name__ == "__main__":
print("Starting SPI Communication Test...\n")
spi_communication_test()
print("\nSPI Test completed")
测试步骤
-
进入
rsetup的Overlay->Manage overlays勾选Enable spidev on SPI1选项,勾选后重启系统 -
将 PI4 引脚和 PI5 引脚连接
-
将代码保存为
spi_example.py -
使用
sudo python3 spi_example.py命令运行测试代码
实验现象
终端会输出发送和接收的信息,可以根据发送和接收的数据是否一致判断 SPI 回环测试是否成功。