ROS2 快速体验(Turtlesim)
使用小海龟 (Turtlesim) 案例快速体验 ROS2 常见基础概念和功能。
该教程基于 ROS2 Humble 的 Docker 镜像操作,但不局限于 Docker 环境,任何 ROS2 环境都可以操作。
若您是基于 Docker 环境操作,建议您先学习 Docker 的使用。
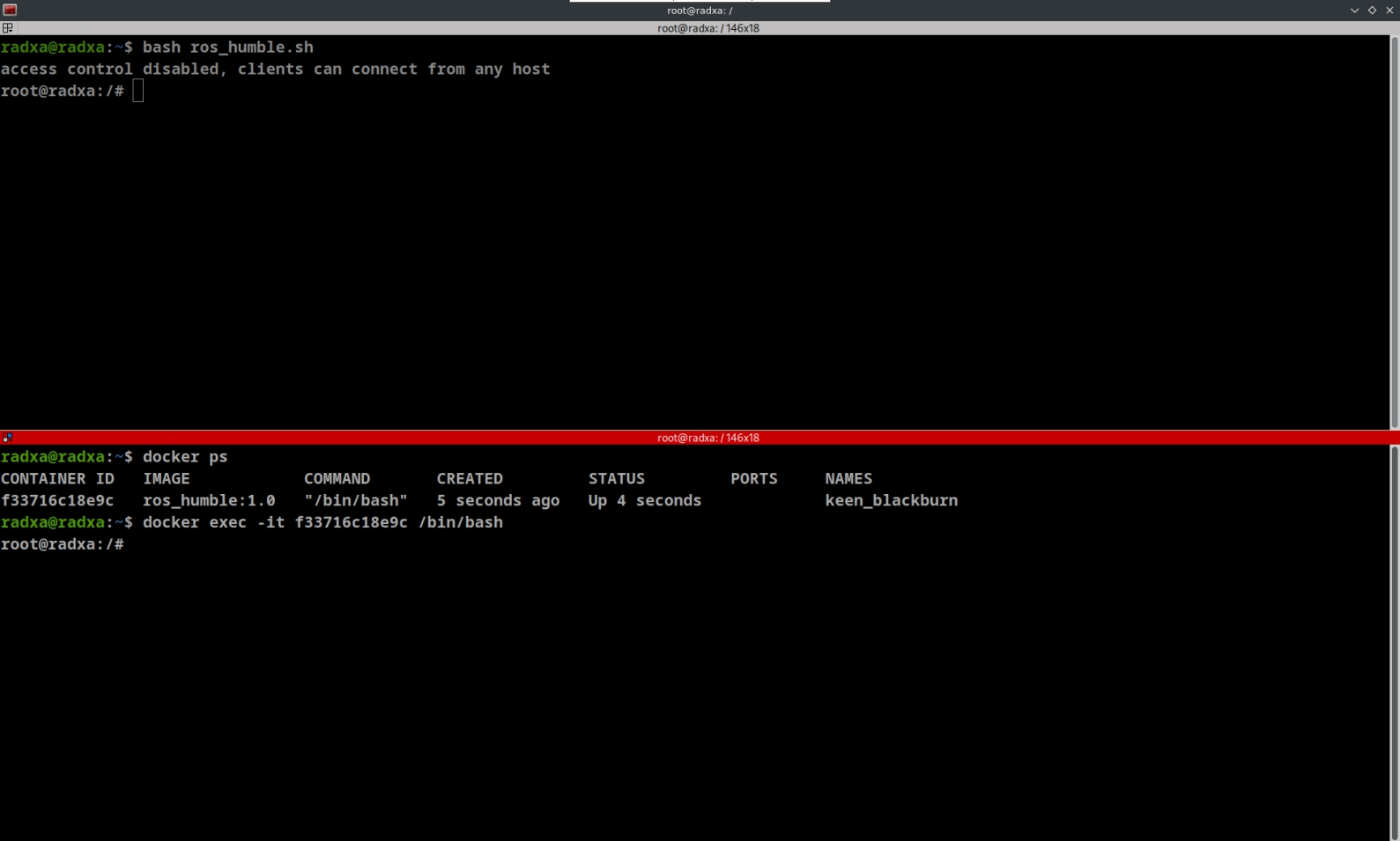
启动 Docker 脚本
使用以下命令启动 Docker 脚本:ros_humble.sh 是在 ROS2 环境搭建中创建的脚本。
bash ros_humble.sh
建议使用多个终端进入同一个 Docker 容器中,方便后续操作。
启动 Turtlesim
使用以下命令启动 Turtlesim:
ros2 run turtlesim turtlesim_node
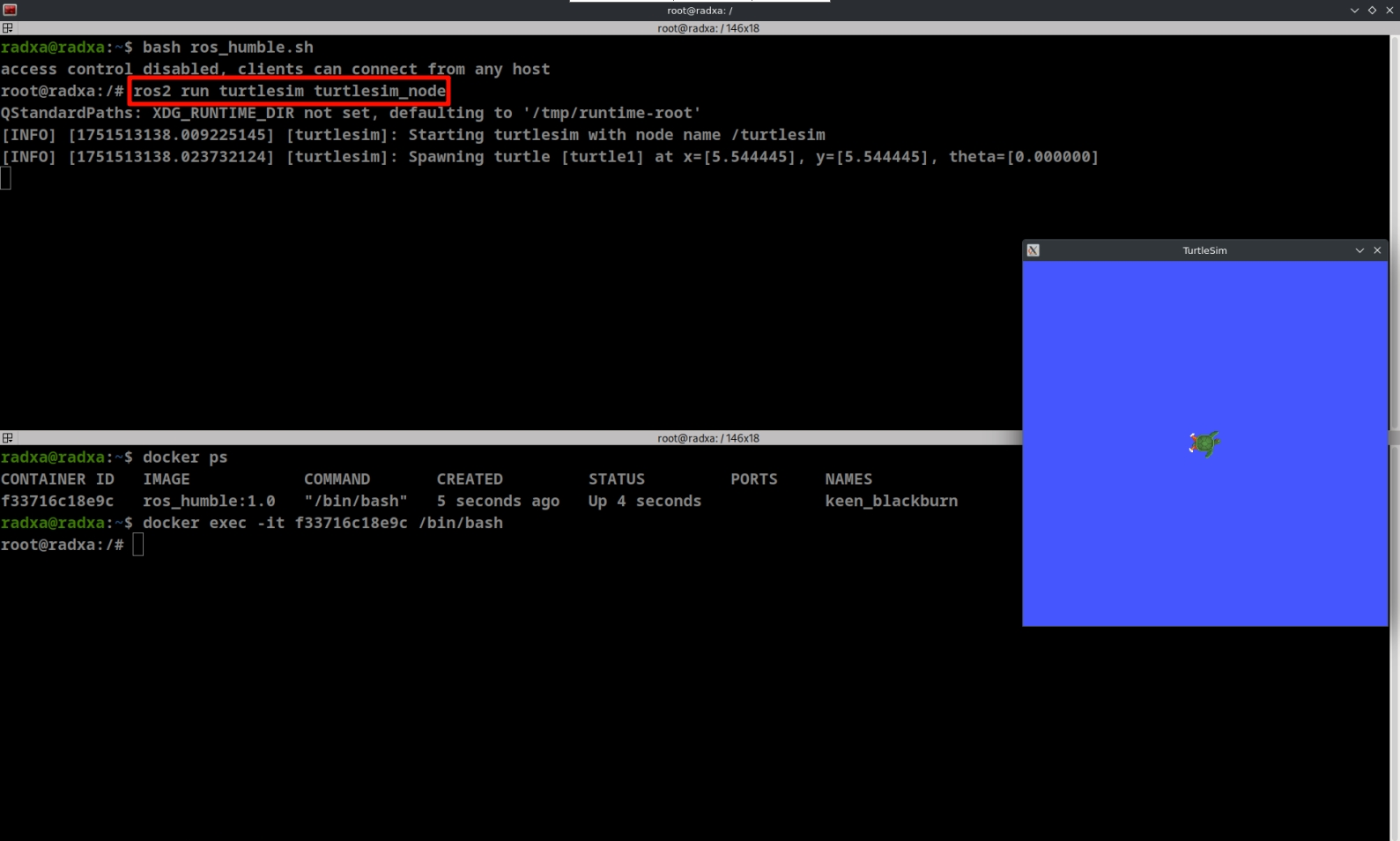
该命令会创建 /turtlesim 节点和显示一个包含小海龟的窗口。
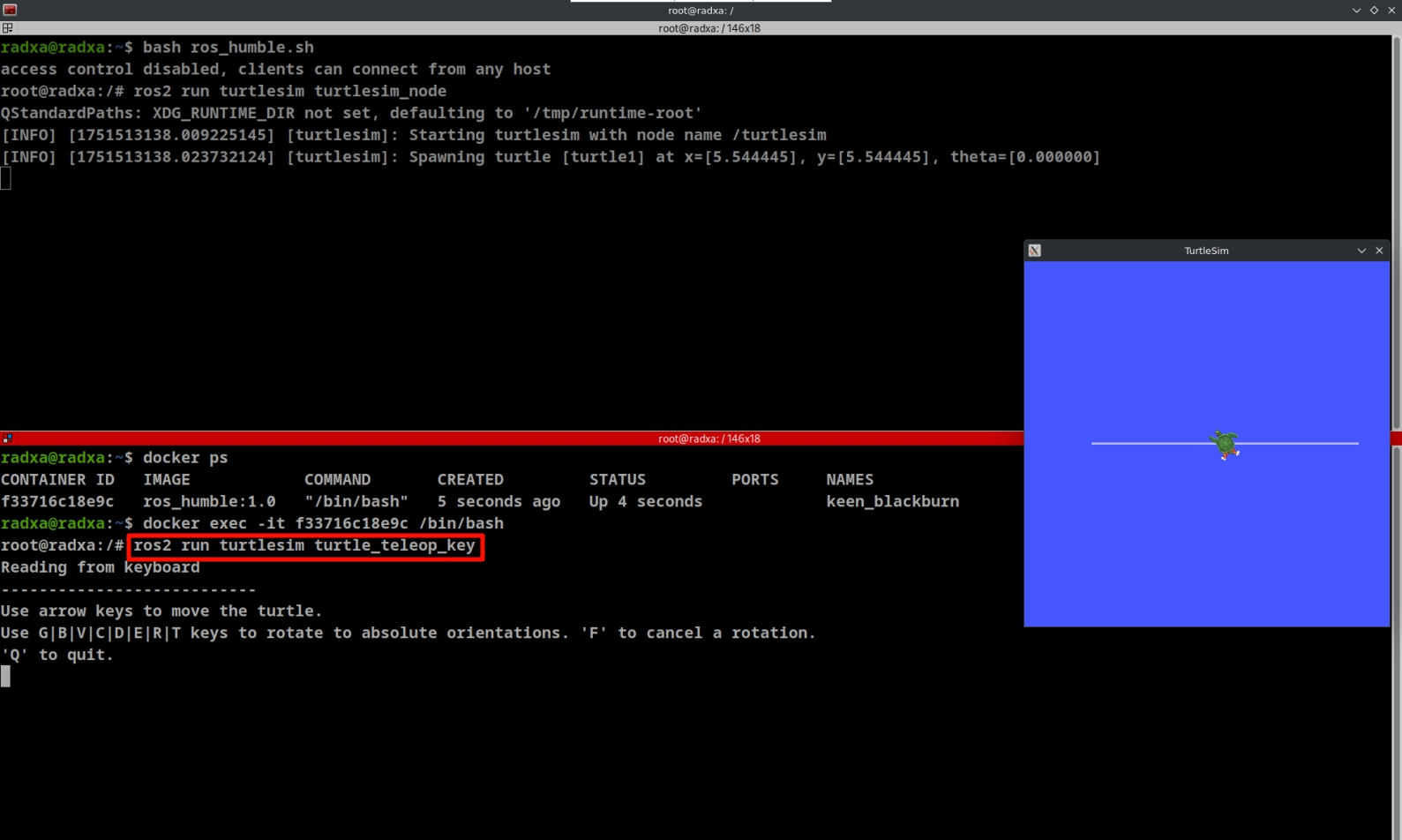
控制 Turtlesim
使用以下命令控制小海龟移动:
ros2 run turtlesim turtle_teleop_key
该命令会创建 /teleop_turtle 节点。
鼠标点击并停留在这个键盘控制的终端窗口,我们可以通过键盘上的方向键控制小海龟移动。
ROS2 基础概念
通过 Turtlesim 案例,我们可以进一步了解和使用 ROS2 的基础概念和命令。
关闭正在运行的 ROS2 命令,可以使用 Ctrl + C 组合键。
ROS2 节点
节点是 ROS2 中的基本通信单元,通过发布者(Publisher)和订阅者(Subscriber)与其他节点交互。
关键组成:
- 发布者:向话题(Topic)发布消息的接口
- 订阅者:从话题接收消息的接口
查看节点
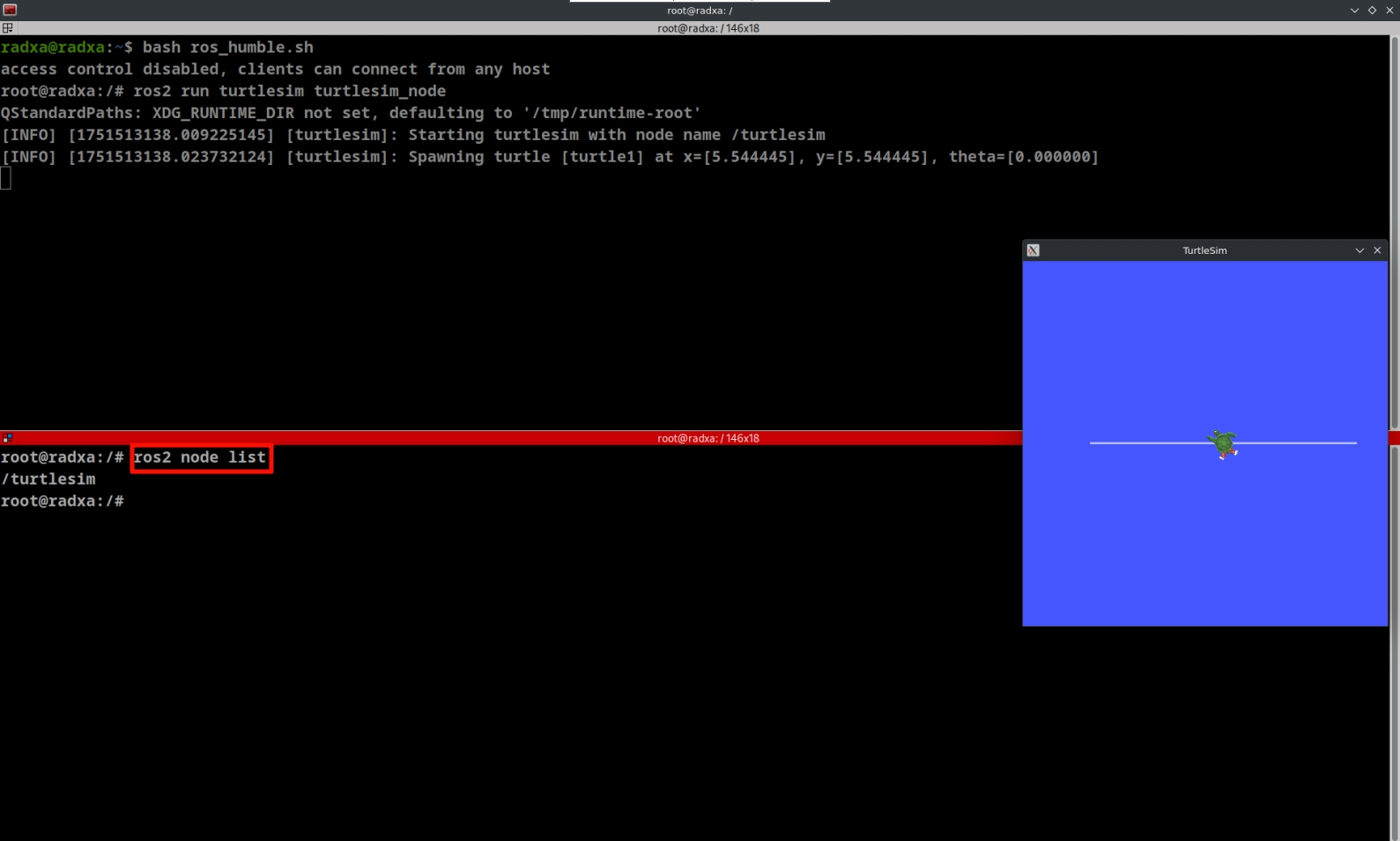
使用 ros2 node list 命令查看节点:目前只运行启动 Turtlesim 的命令。
ros2 node list
ROS2 话题
话题是 ROS2 中的发布/订阅通信机制,实现节点间的异步数据传输。
通信角色:
- 发布者:将消息发送到指定话题
- 订阅者:订阅话题并接收消息
查看话题
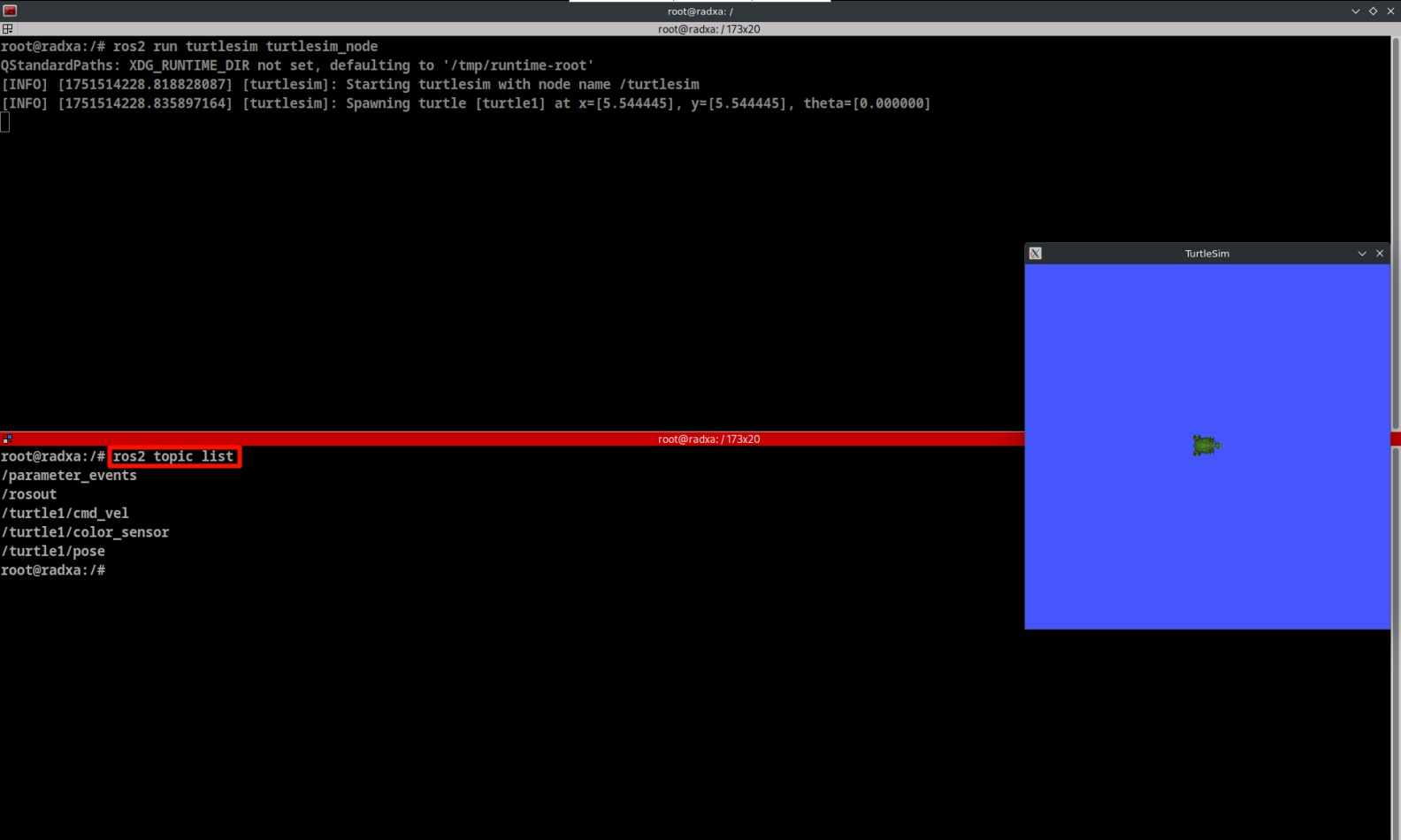
使用 ros2 topic list 命令查看话题:
ros2 topic list
发布话题
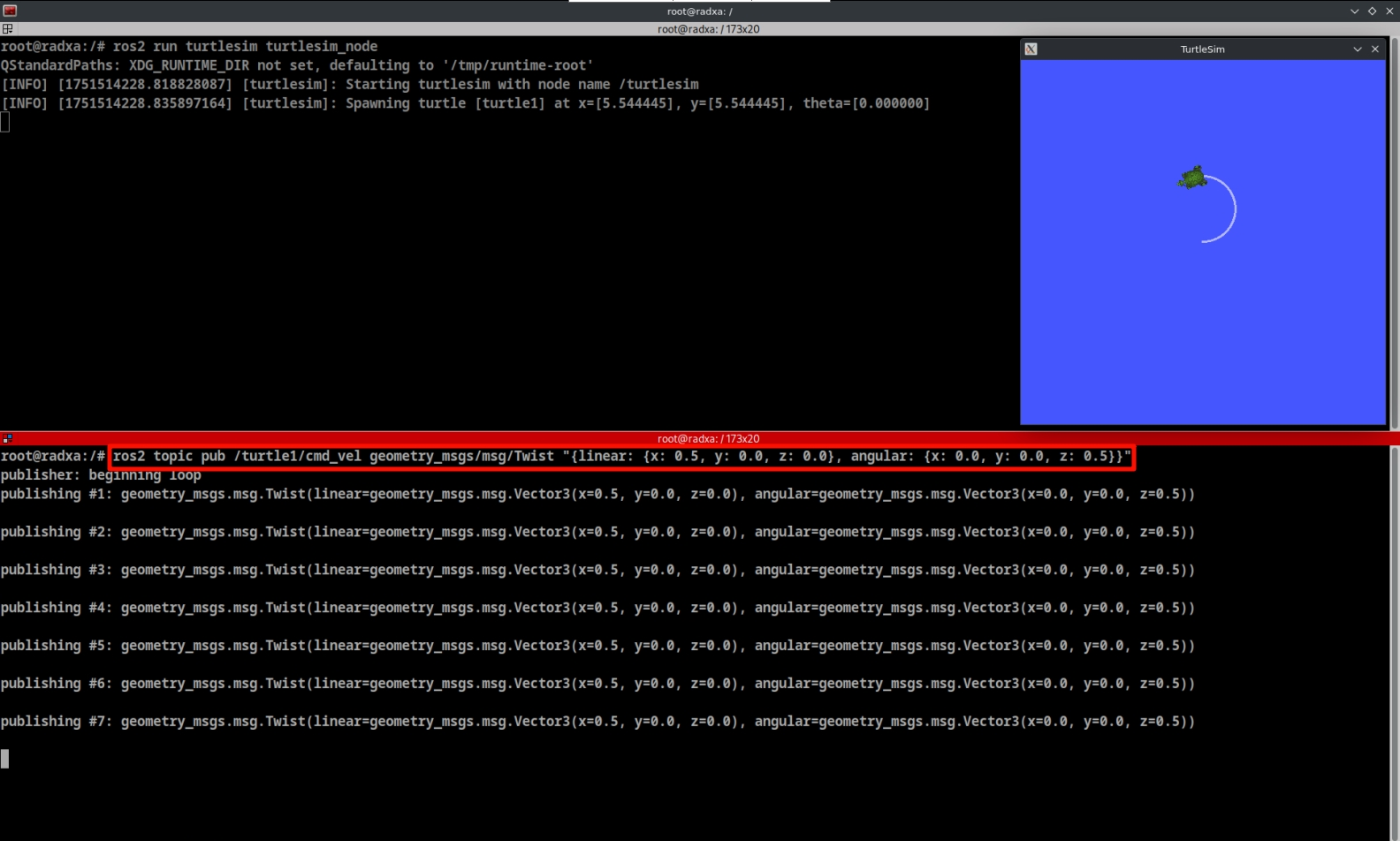
使用 ros2 topic pub 命令发布速度控制消息,让小乌龟移动:
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.5, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.5}}"
该命令会让小海龟以线速度 0.5 和角速度 0.5 移动。
订阅话题
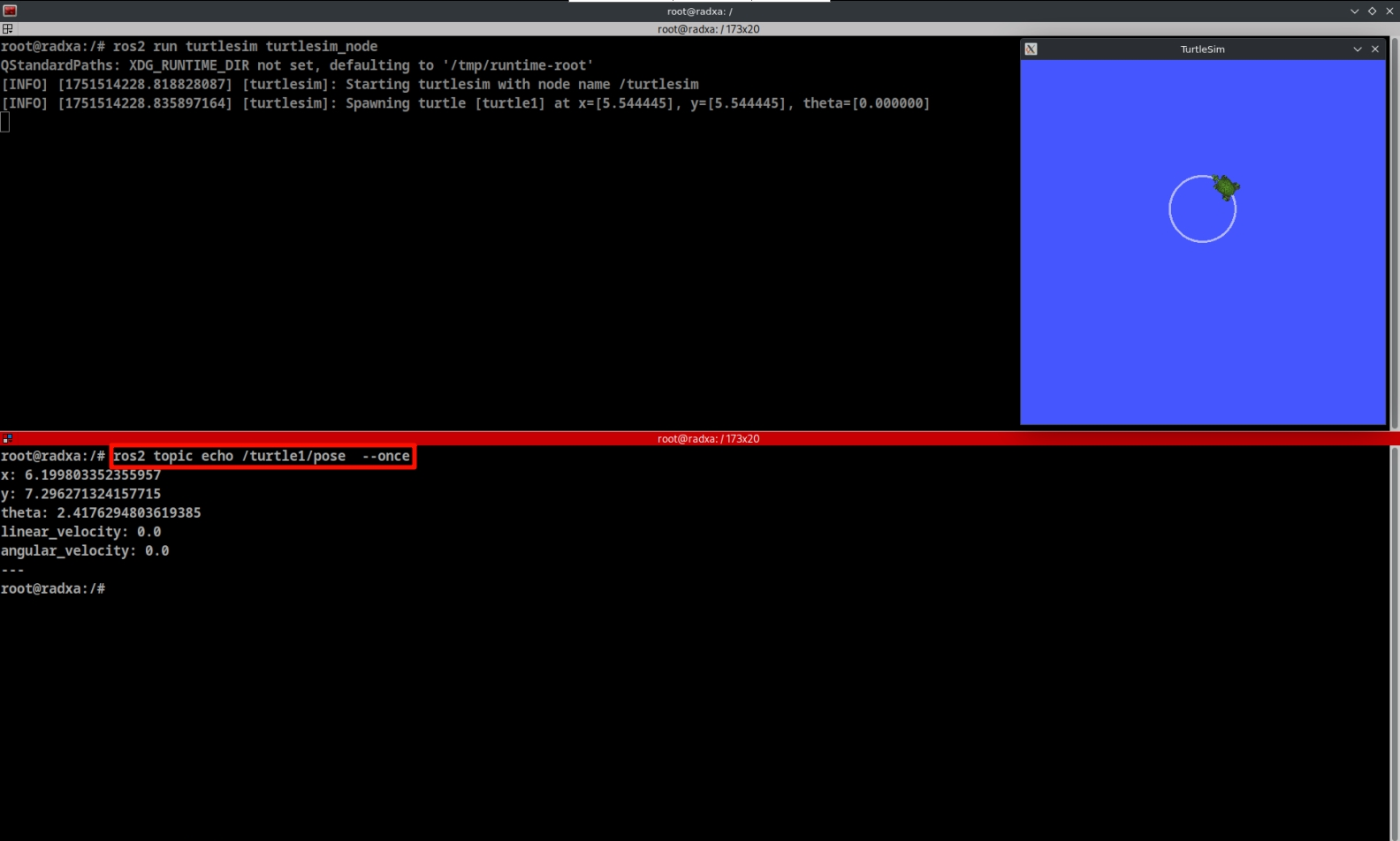
使用 ros2 topic echo 命令订阅话题,查看话题消息:
ros2 topic echo /turtle1/pose --once
该命令会在终端打印一次小海龟位置,去掉 --once 会一直打印小海龟位置。
ROS2 服务
服务是 ROS2 中的请求/响应通信机制,用于节点间的同步调用(如远程函数)。
交互流程:
- 客户端:发送请求(Request)
- 服务端:处理请求并返回响应(Response)
查看服务
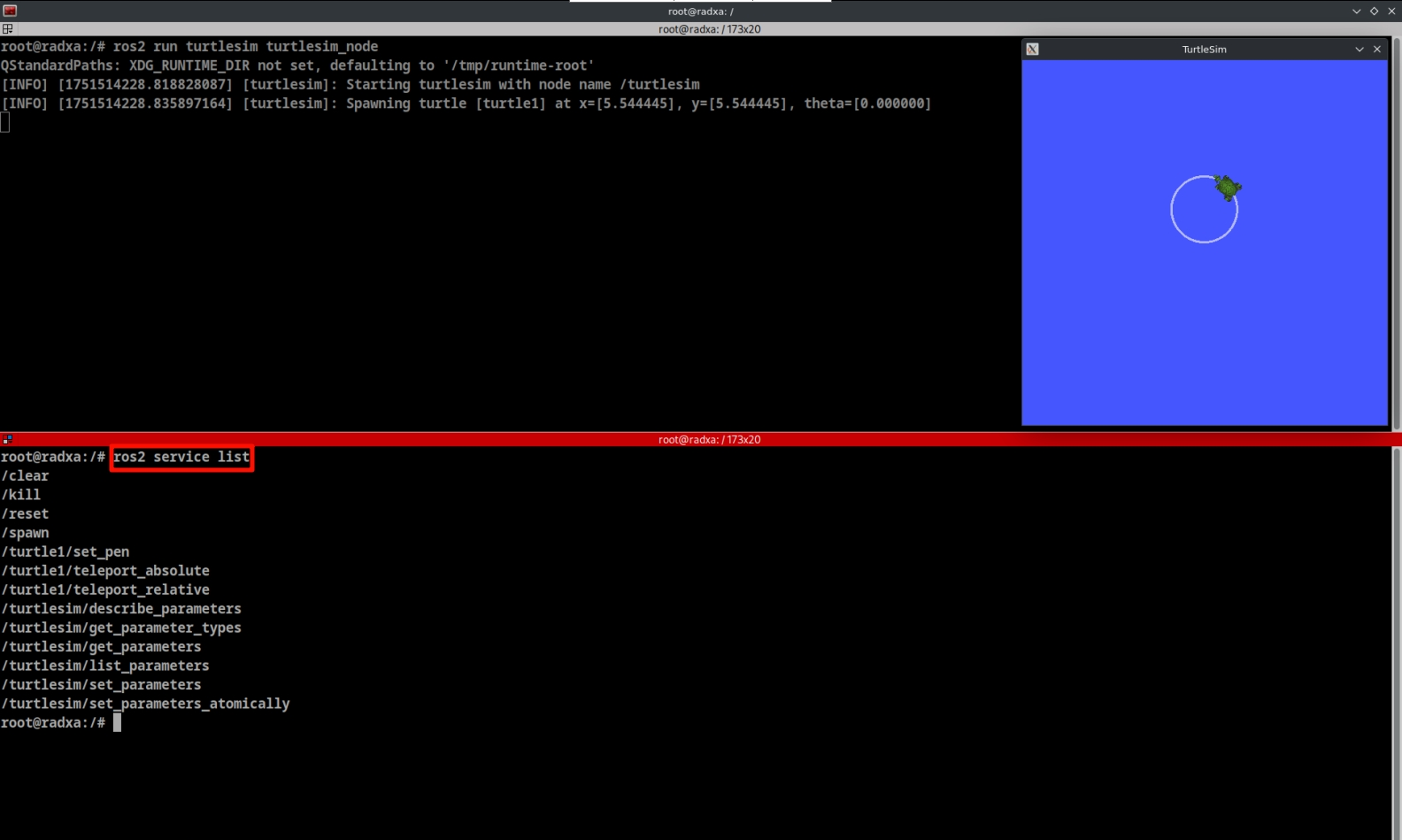
使用 ros2 service list 命令查看服务:
ros2 service list
调用服务
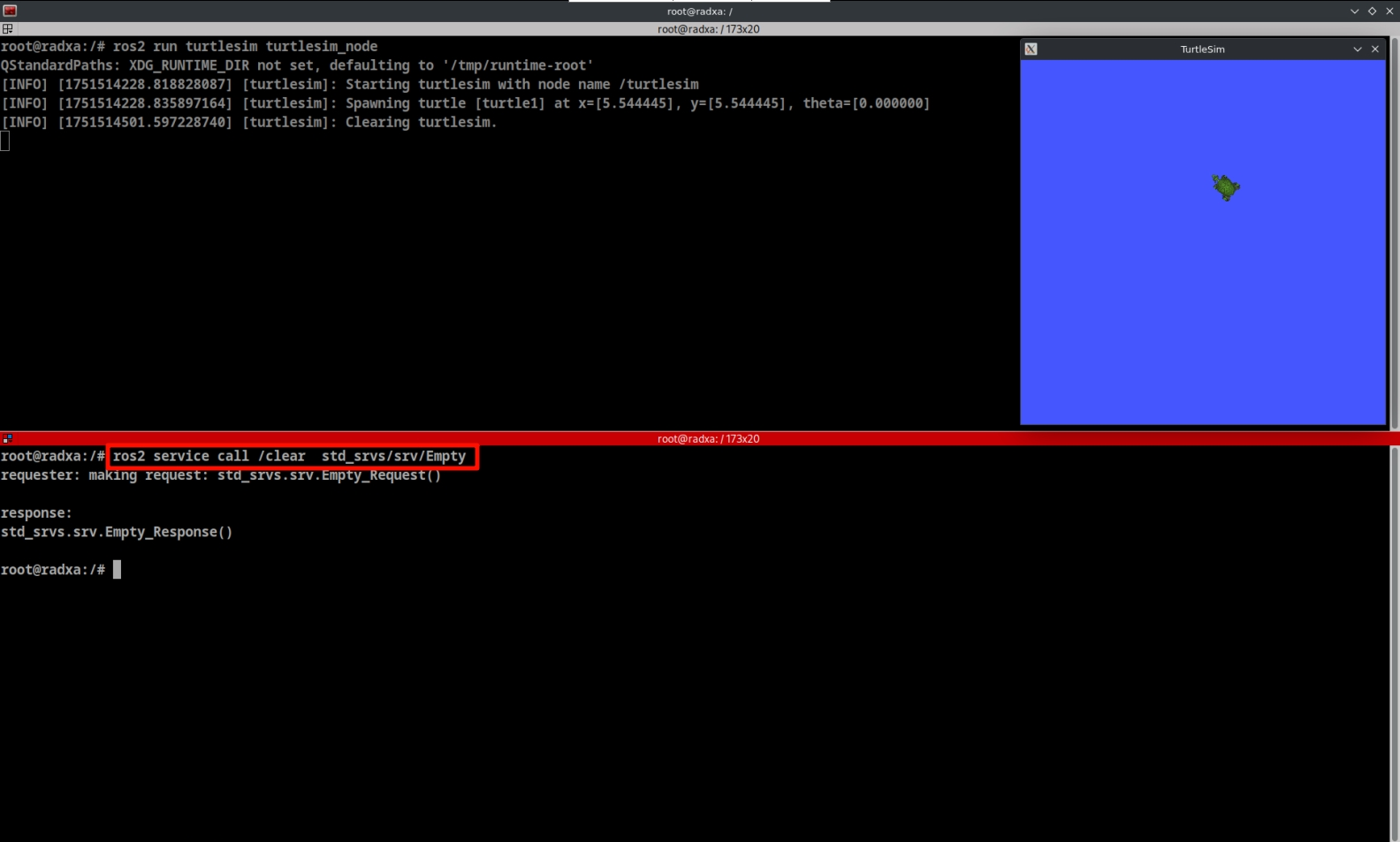
使用 ros2 service call 命令调用服务,让小乌龟清屏:
ros2 service call /clear std_srvs/srv/Empty
该命令会清除Turtlesim窗口中的背景。
ROS2 动作
动作是 ROS2 中处理长时间任务的通信机制(如导航、机械臂控制),支持实时反馈。
三阶段交互:
- 目标(Goal):客户端发起任务请求
- 反馈(Feedback):服务端持续推送进度
- 结果(Result):任务完成后返回最终结果
查看动作
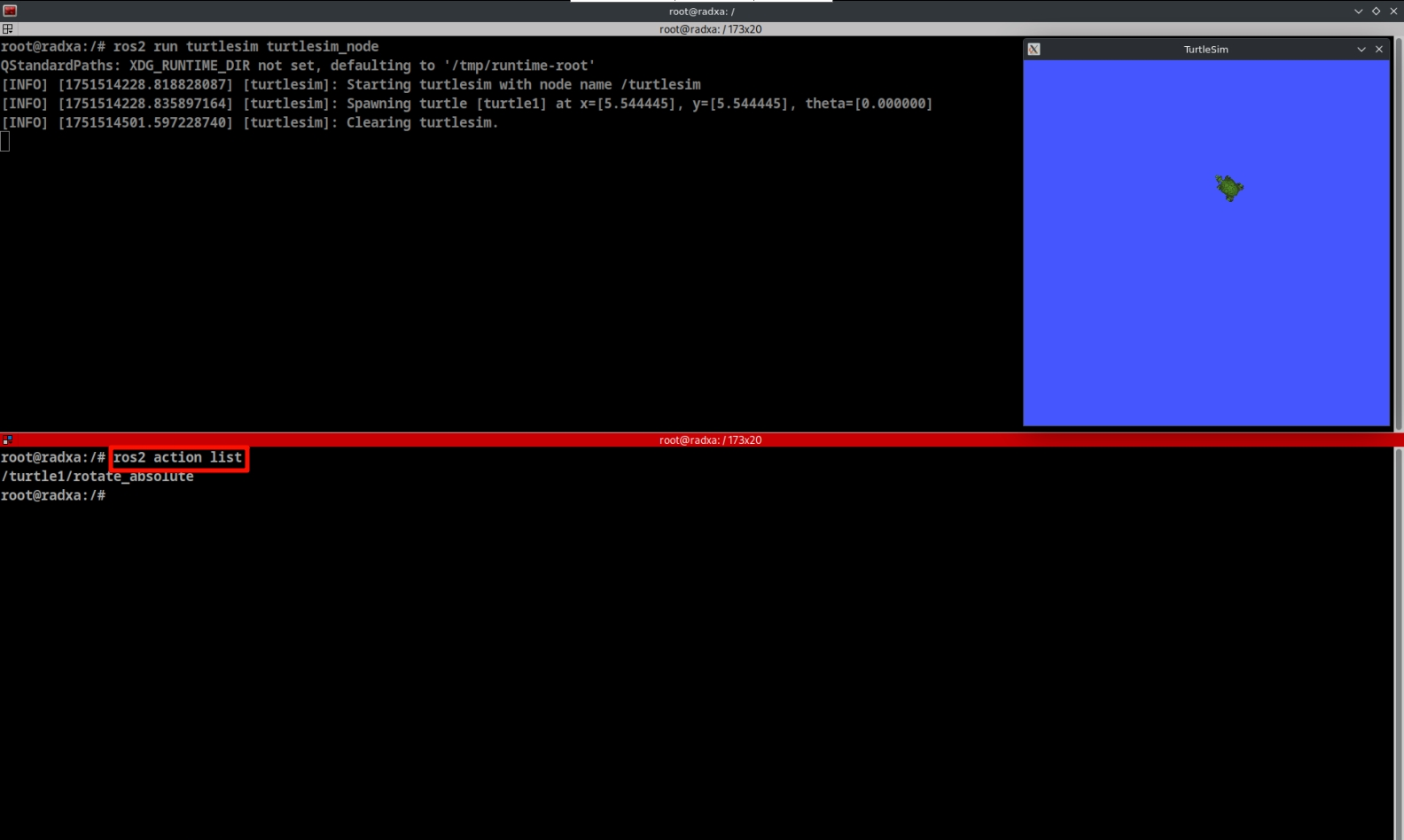
使用 ros2 action list 命令查看动作:
ros2 action list
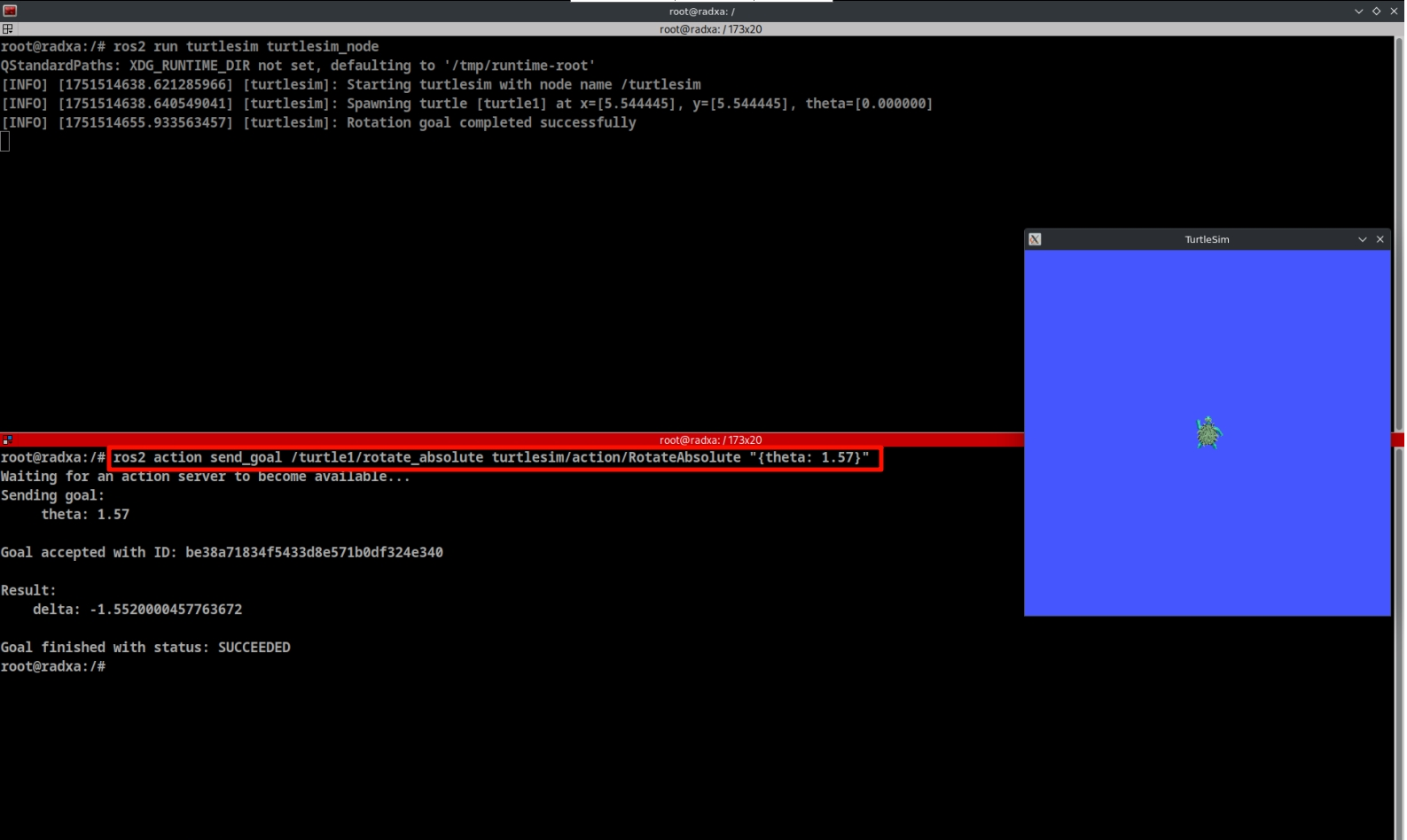
发布动作
使用 ros2 action send_goal 命令发布动作,让小乌龟移动到指定位置:
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
该命令会让小海龟旋转 1.57 弧度(约 90 度)。