OpenCV 示例
主要介绍 OpenCV 图片的预览、摄像头调用以及视觉玩法示例。
图像预览
演示如何读取图片和摄像头画面并显示。
图片预览
读取图片并显示出来。
运行案例步骤:
- 新建
preview_image.py文件 - 将代码复制到
preview_image.py文件 - 使用
python3 preview_image.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
preview_image.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
# Read the image
image_path = './radxa_logo.png' # Replace with your image path
image = cv2.imread(image_path)
# Check if the image is loaded successfully
if image is None:
print("Failed to load image. Please check the file path.")
else: # Display the image in a window
while True:
cv2.imshow('Preview', image) # Wait for 'q' key to quit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
预览效果:

实时预览
读取摄像头画面并显示。
运行案例步骤:
- 新建
preview_camera.py文件 - 将代码复制到
preview_camera.py文件 - 使用
python3 preview_camera.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
其中代码中的 cv2.VideoCapture(0) 表示打开 /dev/video0 摄像头,若你有多个摄像头或者摄像头设备文件不为 /dev/video0,请根据实际情况修改代码。
preview_camera.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
# Open the camera
video_capture = cv2.VideoCapture(0)
while True: # Read a frame from the camera
ret, frame = video_capture.read()
# Check if the frame is read successfully
if not ret:
print("Failed to read frame. Please check the camera connection.")
break
# Display the frame in a window
cv2.imshow('Preview', frame)
# Wait for 'q' key to quit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# Release the camera and close the window
video_capture.release()
cv2.destroyAllWindows()
预览效果:

Harris 角点检测
Harris 角点检测(Harris Corner Detection)是一种经典的图像特征点检测算法,用于检测图像中的角点。
图片识别
读取图片并进行 Harris 角点检测。
运行案例步骤:
- 新建
harris_image.py文件 - 将代码复制到
harris_image.py文件 - 使用
python3 harris_image.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
harris_image.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import numpy as np
# Harris corner detection parameters
block_size = 2
ksize = 3
k = 0.04
threshold = 0.01
# Read the image
image_path = './radxa_logo.png' # Replace with your image path
image = cv2.imread(image_path)
# Check if the image is loaded successfully
if image is None:
print("Failed to load image. Please check the file path.")
else: # Convert to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
# Apply Harris corner detection
dst = cv2.cornerHarris(gray, block_size, ksize, k)
# Dilate corner points for better visualization
dst = cv2.dilate(dst, None)
# Mark corners in red
image[dst > threshold * dst.max()] = [0, 0, 255]
# Display the result
while True:
cv2.imshow('Harris Corners', image)
# Wait for 'q' key to quit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
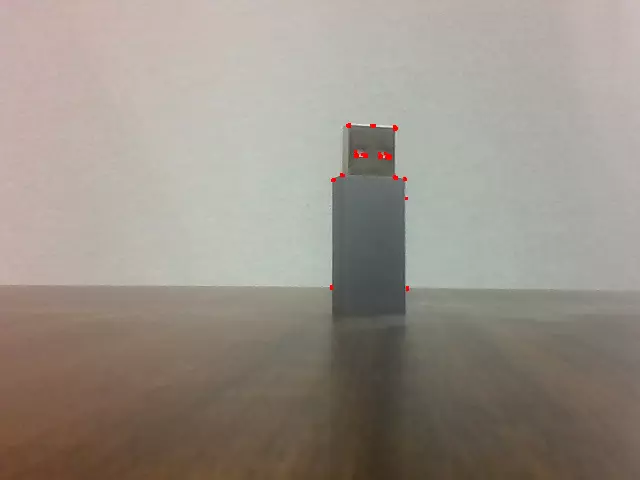
预览效果:

实时检测
读取摄像头画面并进行 Harris 角点检测。
运行案例步骤:
- 新建
harris_camera.py文件 - 将代码复制到
harris_camera.py文件 - 使用
python3 harris_camera.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
其中代码中的 cv2.VideoCapture(0) 表示打开 /dev/video0 摄像头,若你有多个摄像头或者摄像头设备文件不为 /dev/video0,请根据实际情况修改代码。
harris_camera.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import numpy as np
# Harris corner detection parameters
block_size = 2
ksize = 3
k = 0.04
threshold = 0.01
# Initialize the camera
cap = cv2.VideoCapture(0)
# Check if the camera is opened successfully
if not cap.isOpened():
print("Error: Could not open camera.")
exit()
while True: # Capture frame-by-frame
ret, frame = cap.read()
# If frame is read correctly, ret is True
if not ret:
print("Error: Failed to capture frame.")
break
# Create a copy of the frame for processing
display_frame = frame.copy()
# Convert to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
# Apply Harris corner detection
dst = cv2.cornerHarris(gray, block_size, ksize, k)
# Dilate corner points for better visualization
dst = cv2.dilate(dst, None)
# Mark corners in red
display_frame[dst > threshold * dst.max()] = [0, 0, 255]
# Display the resulting frame
cv2.imshow('Harris Corners - Camera', display_frame)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# When everything done, release the capture and close windows
cap.release()
cv2.destroyAllWindows()
预览效果:
Shi-Tomasi 角点检测
Shi-Tomasi 角点检测(Shi-Tomasi Corner Detection)是 Harris 角点检测的改进算法,用于检测图像中的角点。
图片识别
读取图片并进行 Shi-Tomasi 角点检测。
运行案例步骤:
- 新建
shi_tomasi_image.py文件 - 将代码复制到
shi_tomasi_image.py文件 - 使用
python3 shi_tomasi_image.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
shi_tomasi_image.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import numpy as np
# Shi-Tomasi corner detection parameters
max_corners = 100
quality_level = 0.01
min_distance = 10
# Read the image
image_path = './radxa_logo.png' # Replace with your image path
image = cv2.imread(image_path)
# Check if the image is loaded successfully
if image is None:
print("Failed to load image. Please check the file path.")
else: # Create a copy of the image for display
display_image = image.copy()
# Convert to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Detect corners using Shi-Tomasi
corners = cv2.goodFeaturesToTrack(gray, max_corners, quality_level, min_distance)
# Draw circles around detected corners
if corners is not None:
corners = np.int0(corners)
for corner in corners:
x, y = corner.ravel()
cv2.circle(display_image, (x, y), 5, (0, 255, 0), -1) # Green circles
# Display the result
while True:
cv2.imshow('Shi-Tomasi Corners', display_image)
# Wait for 'q' key to quit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
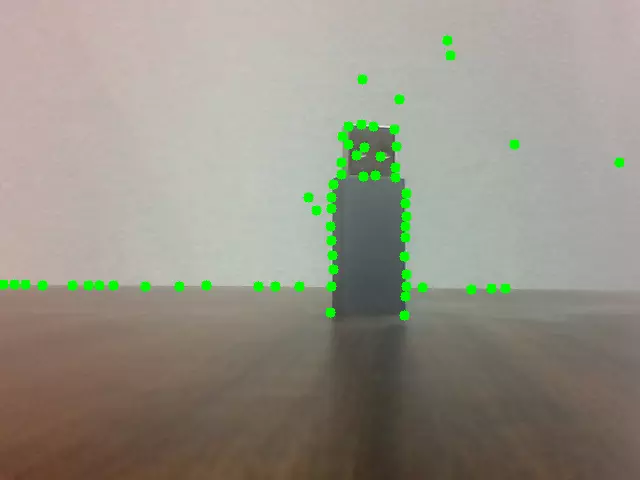
预览效果:

实时检测
读取摄像头画面并进行 Shi-Tomasi 角点检测。
运行案例步骤:
- 新建
shi_tomasi_camera.py文件 - 将代码复制到
shi_tomasi_camera.py文件 - 使用
python3 shi_tomasi_camera.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
其中代码中的 cv2.VideoCapture(0) 表示打开 /dev/video0 摄像头,若你有多个摄像头或者摄像头设备文件不为 /dev/video0,请根据实际情况修改代码。
shi_tomasi_camera.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import numpy as np
# Shi-Tomasi corner detection parameters
max_corners = 100
quality_level = 0.01
min_distance = 10
# Initialize the camera
cap = cv2.VideoCapture(0)
# Check if the camera is opened successfully
if not cap.isOpened():
print("Error: Could not open camera.")
exit()
while True: # Capture frame-by-frame
ret, frame = cap.read()
# If frame is read correctly, ret is True
if not ret:
print("Error: Failed to capture frame.")
break
# Create a copy of the frame for display
display_frame = frame.copy()
# Convert to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Detect corners using Shi-Tomasi
corners = cv2.goodFeaturesToTrack(gray, max_corners, quality_level, min_distance)
# Draw circles around detected corners
if corners is not None:
corners = np.int0(corners)
for corner in corners:
x, y = corner.ravel()
cv2.circle(display_frame, (x, y), 5, (0, 255, 0), -1) # Green circles
# Display the resulting frame
cv2.imshow('Shi-Tomasi Corners - Camera', display_frame)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# When everything done, release the capture and close windows
cap.release()
cv2.destroyAllWindows()
预览效果:
ORB 特征检测
ORB(Oriented FAST and Rotated BRIEF)是一种高效的特征检测与描述算法,结合了 FAST 关键点检测器 和 BRIEF 描述符,并进行了改进以提升性能,尤其在计算效率和旋转不变性方面表现突出。
图片识别
读取图片并进行 ORB 特征检测。
运行案例步骤:
- 新建
orb_image.py文件 - 将代码复制到
orb_image.py文件 - 使用
python3 orb_image.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
orb_image.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import numpy as np
# Read the image
image_path = './radxa_logo.png' # Replace with your image path
image = cv2.imread(image_path)
# Check if the image is loaded successfully
if image is None:
print("Failed to load image. Please check the file path.")
else: # Create a copy of the image for display
display_image = image.copy()
# Convert to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Initialize ORB detector
orb = cv2.ORB_create(nfeatures=500)
# Detect keypoints and compute descriptors
keypoints, descriptors = orb.detectAndCompute(gray, None)
# Draw keypoints on the image
display_image = cv2.drawKeypoints(image, keypoints, None, color=(0, 255, 0),
flags=cv2.DRAW_MATCHES_FLAGS_DEFAULT)
# Display the result
while True:
cv2.imshow('ORB Features', display_image)
# Wait for 'q' key to quit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
预览效果:

实时检测
读取摄像头画面并进行 ORB 特征检测。
运行案例步骤:
- 新建
orb_camera.py文件 - 将代码复制到
orb_camera.py文件 - 使用
python3 orb_camera.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
其中代码中的 cv2.VideoCapture(0) 表示打开 /dev/video0 摄像头,若你有多个摄像头或者摄像头设备文件不为 /dev/video0,请根据实际情况修改代码。
orb_camera.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import numpy as np
# Initialize ORB detector
orb = cv2.ORB_create(nfeatures=500)
# Initialize the camera
cap = cv2.VideoCapture(0)
# Check if the camera is opened successfully
if not cap.isOpened():
print("Error: Could not open camera.")
exit()
while True: # Capture frame-by-frame
ret, frame = cap.read()
# If frame is read correctly, ret is True
if not ret:
print("Error: Failed to capture frame.")
break
# Convert to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Detect keypoints and compute descriptors
keypoints, descriptors = orb.detectAndCompute(gray, None)
# Draw keypoints on the frame
display_frame = cv2.drawKeypoints(frame, keypoints, None,
color=(0, 255, 0),
flags=cv2.DRAW_MATCHES_FLAGS_DEFAULT)
# Display the number of keypoints
cv2.putText(display_frame, f'Keypoints: {len(keypoints)}', (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
# Display the resulting frame
cv2.imshow('ORB Features - Camera', display_frame)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# When everything done, release the capture and close windows
cap.release()
cv2.destroyAllWindows()
预览效果:

人脸识别
基于 Haar Cascade 分类器实现的人脸检测功能,其核心原理是通过机器学习训练的级联分类器在图像中快速定位人脸区域。
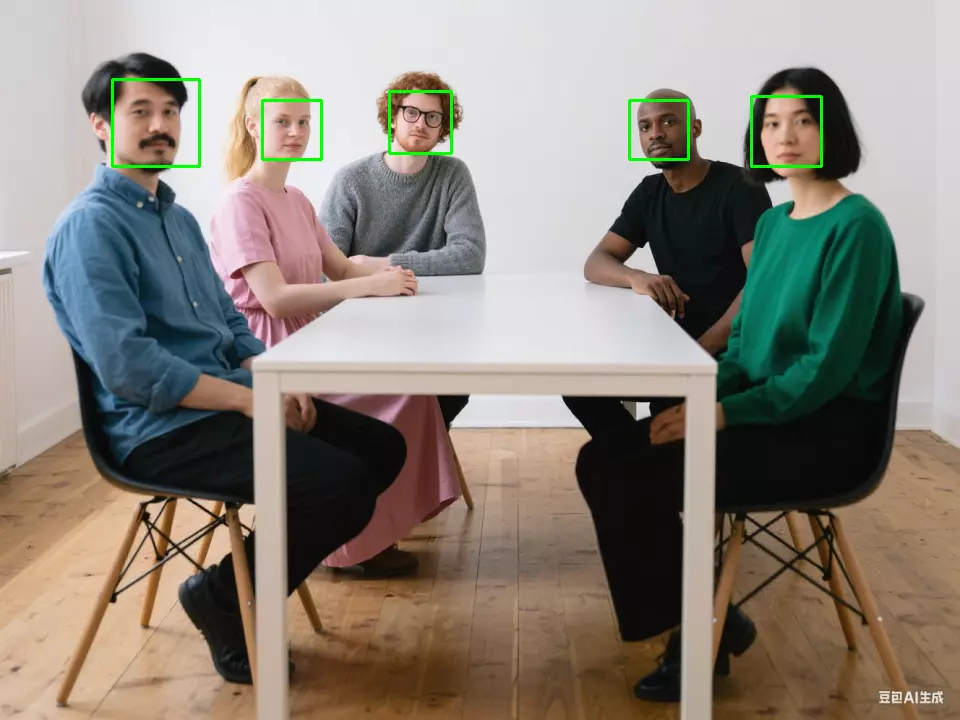
图片识别
读取图片并进行人脸识别。
运行案例步骤:
- 新建
face_recognition_image.py文件 - 将代码复制到
face_recognition_image.py文件 - 使用
python3 face_recognition_image.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
face_recognition_image.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
import os
# Load the pre-trained Haar Cascade classifier for face detection
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
# Read the image
image_path = 'people.png' # Replace with your image path
image = cv2.imread(image_path)
# Check if the image is loaded successfully
if image is None:
print(f"Error: Could not read image at {image_path}")
exit()
# Convert to grayscale (face detection works on grayscale images)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Detect faces in the image
faces = face_cascade.detectMultiScale(
gray,
scaleFactor=1.1, # Scale factor for image pyramid
minNeighbors=5, # How many neighbors each candidate rectangle should have
minSize=(30, 30) # Minimum possible object size
)
# Draw rectangles around the faces
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (0, 255, 0), 2)
# Display the number of faces detected
print(f"Number of faces detected: {len(faces)}")
# Display the result
while True:
cv2.imshow('Face Detection', image) # Wait for 'q' key to quit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
预览效果:
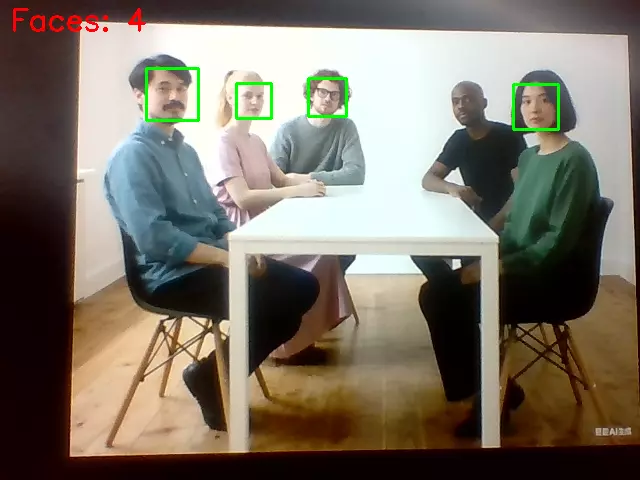
实时检测
读取摄像头画面并进行人脸识别。
运行案例步骤:
- 新建
face_recognition_camera.py文件 - 将代码复制到
face_recognition_camera.py文件 - 使用
python3 face_recognition_camera.py运行案例 - 鼠标点击预览窗口,按
q键终止程序
其中代码中的 cv2.VideoCapture(0) 表示打开 /dev/video0 摄像头,若你有多个摄像头或者摄像头设备文件不为 /dev/video0,请根据实际情况修改代码。
face_recognition_camera.py
#!/usr/bin/env python3
# -_- encoding: utf-8 -_-
import cv2
# Load the pre-trained Haar Cascade classifier for face detection
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
# Initialize the camera
cap = cv2.VideoCapture(0)
# Check if the camera is opened successfully
if not cap.isOpened():
print("Error: Could not open camera.")
exit()
while True: # Capture frame-by-frame
ret, frame = cap.read()
# If frame is read correctly, ret is True
if not ret:
print("Error: Failed to capture frame.")
break
# Convert to grayscale (face detection works on grayscale images)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Detect faces in the frame
faces = face_cascade.detectMultiScale(
gray,
scaleFactor=1.1, # Scale factor for image pyramid
minNeighbors=5, # How many neighbors each candidate rectangle should have
minSize=(30, 30) # Minimum possible object size
)
# Draw rectangles around the faces
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2)
# Display the number of faces detected
cv2.putText(frame, f'Faces: {len(faces)}', (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
# Display the resulting frame
cv2.imshow('Face Detection - Camera', frame)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# When everything done, release the capture and close windows
cap.release()
cv2.destroyAllWindows()
预览效果: