YOLOv8s-pose
YOLOv8-pose is an advanced deep learning model specialized for human pose estimation, launched by Ultralytics. It inherits the excellent architecture of the YOLOv8 series in object detection and integrates object detection with keypoint localization in a single-stage inference process, enabling efficient capture of complex human movements.
- Key Features: Supports real-time human keypoint detection and pose recognition, capable of accurately locating human skeletal joint points. Widely used in human motion analysis, interactive games, behavior monitoring, and rehabilitation guidance.
- Version Note: This case uses the YOLOv8s-pose model. As a lightweight advanced version in the series, it maintains extremely high inference speed while enhancing feature extraction capabilities for complex backgrounds and limb occlusion scenarios by increasing model depth and channel count. It is currently the ideal choice for finding balance between performance and real-time performance, especially suitable for practical application scenarios that require both detection accuracy and edge deployment efficiency.
Environment Setup
Configure the required environment in advance.
Quick Start
Download Model Files
O6 / O6N
cd ai_model_hub_25_Q3/models/ComputeVision/Pose_Estimation/onnx_yolov8s_pose
wget https://www.modelscope.cn/models/cix/ai_model_hub_25_Q3/resolve/master/models/ComputeVision/Pose_Estimation/onnx_yolov8s_pose/yolov8s-pose.cix
Model Testing
info
Activate the virtual environment before running!
O6 / O6N
python3 inference_npu.py
Complete Conversion Workflow
Download Model Files
Linux PC
cd ai_model_hub_25_Q3/models/ComputeVision/Pose_Estimation/onnx_yolov8s_pose/model
wget https://www.modelscope.cn/models/cix/ai_model_hub_25_Q3/resolve/master/models/ComputeVision/Pose_Estimation/onnx_yolov8s_pose/model/yolov8s-pose.onnx
Project Structure
├── cfg
├── datasets
├── inference_npu.py
├── inference_onnx.py
├── model
├── ReadMe.md
├── test_data
└── yolov8s-pose.cix
Perform Model Quantization and Conversion
Linux PC
cd ..
cixbuild cfg/yolov8s_posebuild.cfg
Push to Board
After completing the model conversion, push the cix model file to the board.
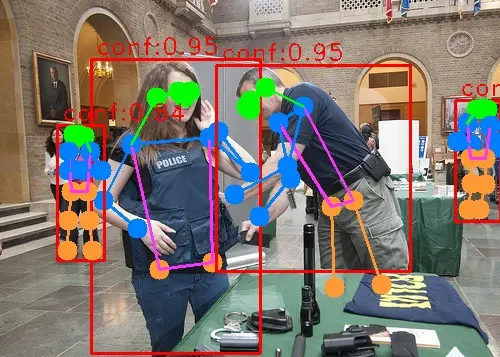
Test Host Inference
Run Inference Script
Linux PC
python3 inference_onnx.py
Model Inference Results

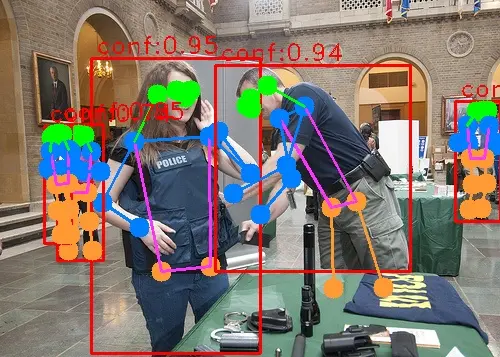
Deploy to NPU
Run Inference Script
O6 / O6N
python3 inference_npu.py
Model Inference Results
O6 / O6N
$ python3 inference_npu.py
npu: noe_init_context success
npu: noe_load_graph success
Input tensor count is 1.
Output tensor count is 1.
npu: noe_create_job success
npu: noe_clean_job success
npu: noe_unload_graph success
npu: noe_deinit_context success