UFLDv2
Ultra Fast Lane Detection (UFLD) 是一类专注于车道线检测的极速深度学习算法。它改变了传统的像素级分割思路,通过创新的基于行选择(Row-based Selection)的分类机制,将检测任务转化为简单的分类问题,极大地提升了模型的运行速度。
- 核心特点:专注于道路场景下的实时车道线检测,能够快速准确地勾勒出车道边界,为自动驾驶系统的车道保持(LKA)和车道偏离预警(LDW)提供核心视觉支持。
- 版本说明:本案例采用 Ultra Fast Lane Detection V2 (UFLDv2) 模型。作为该系列的进阶版本,它引入了混合锚点机制,不仅增强了对曲线及复杂遮挡场景的检测鲁棒性,还保持了该系列一贯的极速推理优势。它在保证低延迟的同时进一步提升了空间结构的捕捉能力,是目前车载嵌入式端实现高效实时车道感知的主流平衡选择。
环境配置
需要提前配置好相关环境。
快速开始
下载模型文件
O6 / O6N
cd ai_model_hub_25_Q3/models/ComputeVision/Lane_Detection/onnx_Ultra_Fast_Lane_Detection_v2
wget -O Ultra_Fast_Lane_Detection_v2.cix https://www.modelscope.cn/models/cix/ai_model_hub_25_Q3/resolve/master/models/ComputeVision/Lane_Detection/onnx_Ultra_Fast_Lane_Detection_v2/Ultra_Fast_Lane_Detection_v2.cix
模型测试
信息
运行前激活虚拟环境!
O6 / O6N
python3 inference_npu.py
完整转换流程
下载模型文件
Linux PC
cd ai_model_hub_25_Q3/models/ComputeVision/Lane_Detection/onnx_Ultra_Fast_Lane_Detection_v2/model
wget -O Ultra_Fast_Lane_Detection_v2.onnx https://www.modelscope.cn/models/cix/ai_model_hub_25_Q3/resolve/master/models/ComputeVision/Lane_Detection/onnx_Ultra_Fast_Lane_Detection_v2/model/Ultra_Fast_Lane_Detection_v2.onnx
项目结构
├── cfg
├── datasets
├── inference_npu.py
├── inference_onnx.py
├── model
├── ReadMe.md
├── test_data
└── Ultra_Fast_Lane_Detection_v2.cix
进行模型量化和转换
Linux PC
cd ..
cixbuild cfg/Ultra-Fast-Lane-Detection_v2build.cfg
推送到板端
完成模型转换之后需要将 cix 模型文件推送到板端。
测试主机推理
运行推理脚本
Linux PC
python3 inference_onnx.py
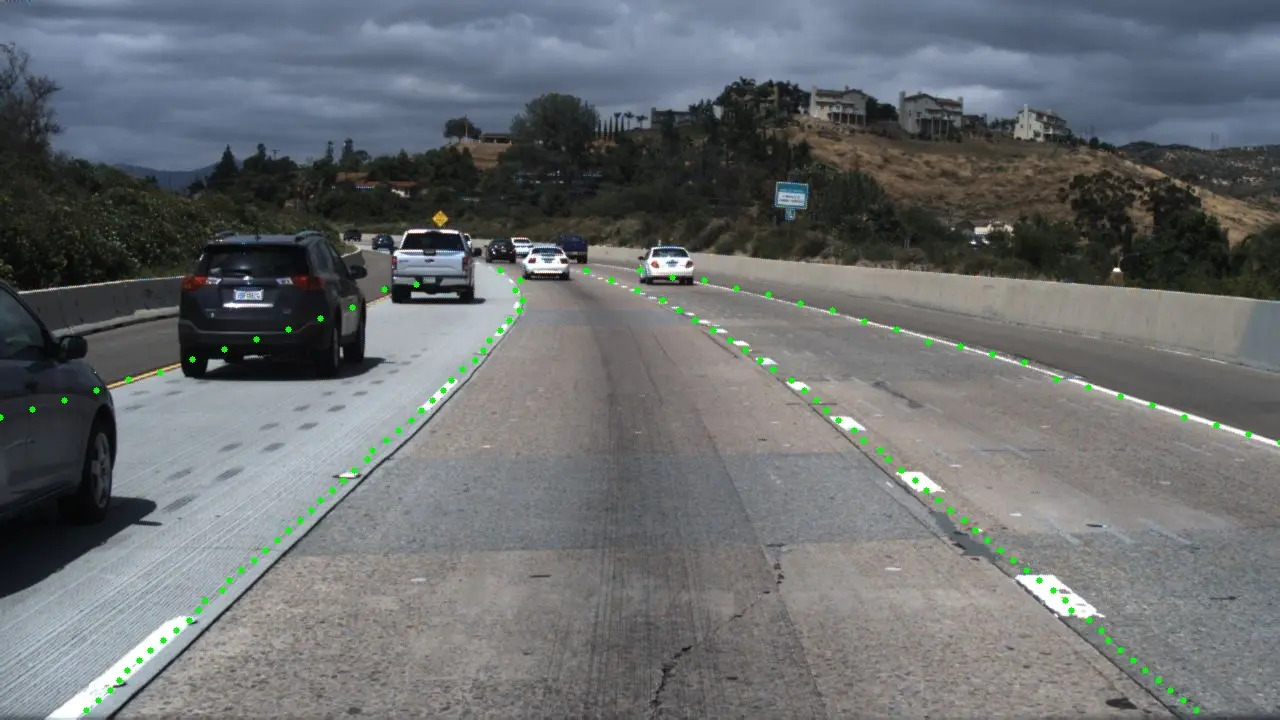
模型推理结果


进行 NPU 部署
运行推理脚本
O6 / O6N
python3 inference_npu.py
模型推理结果
O6 / O6N
$ python3 inference_npu.py
npu: noe_init_context success
npu: noe_load_graph success
Input tensor count is 1.
Output tensor count is 4.
npu: noe_create_job success
npu: noe_clean_job success
npu: noe_unload_graph success
npu: noe_deinit_context success


