Control RP2040 on Windows
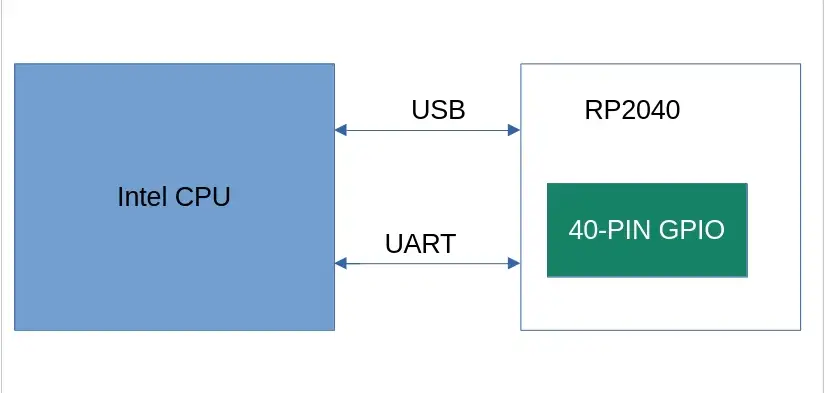
Relation introduction between J4215 and 40-PIN GPIO
The Radxa X4 integrates an Intel N100 CPU and a RP2040 MCU, which communicate with each other via USB or UART. The 40-PIN interface serves as an I/O expansion port extending from the RP2040 microcontroller. The CPU exerts control over this interface through communication with the RP2040, which leverages the Pico SDK for efficient manipulation and operation of the 40-PIN interface.
Cross compilation toolchain
Install necessary Tools
-
This tool facilitates the use of git commands and provides you with some Linux commands that you can use to build the
-
-
-
-
Download and unzip it.
Set Environment Variables
-
Search for ‘Edit the system environment’ in the search bar.
-
Click "Environment Variables"
-
Add system or user variables
- Add variables PICO_INSTALL_PATH and PICO-SDK_PATH
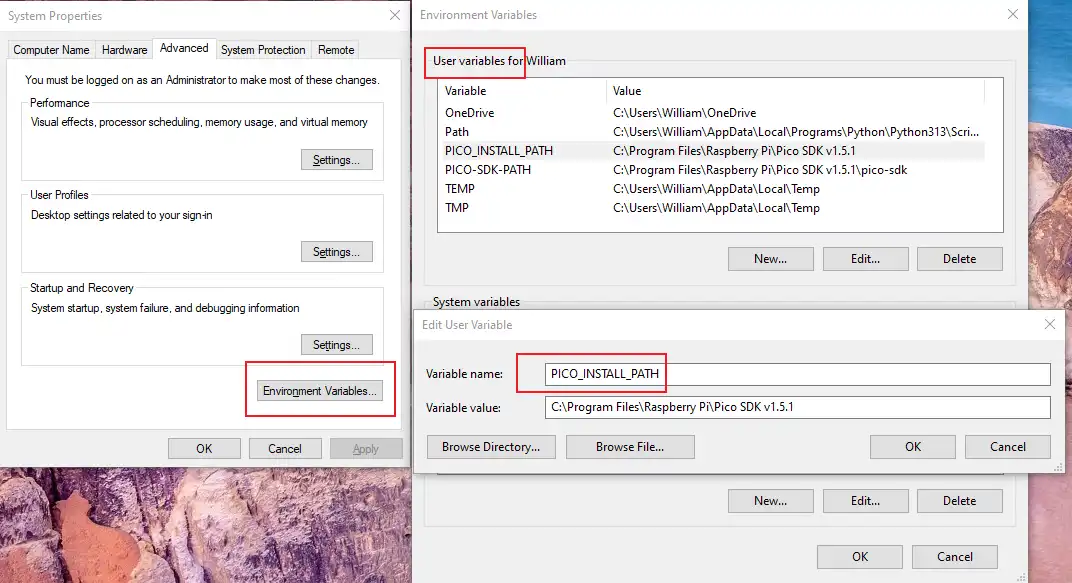
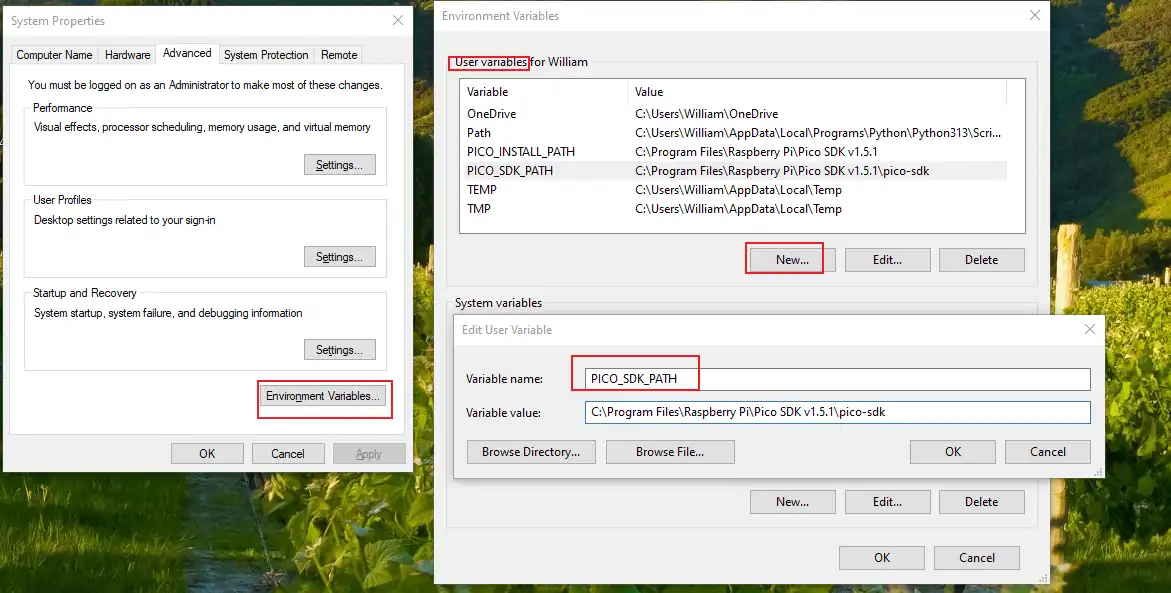
-
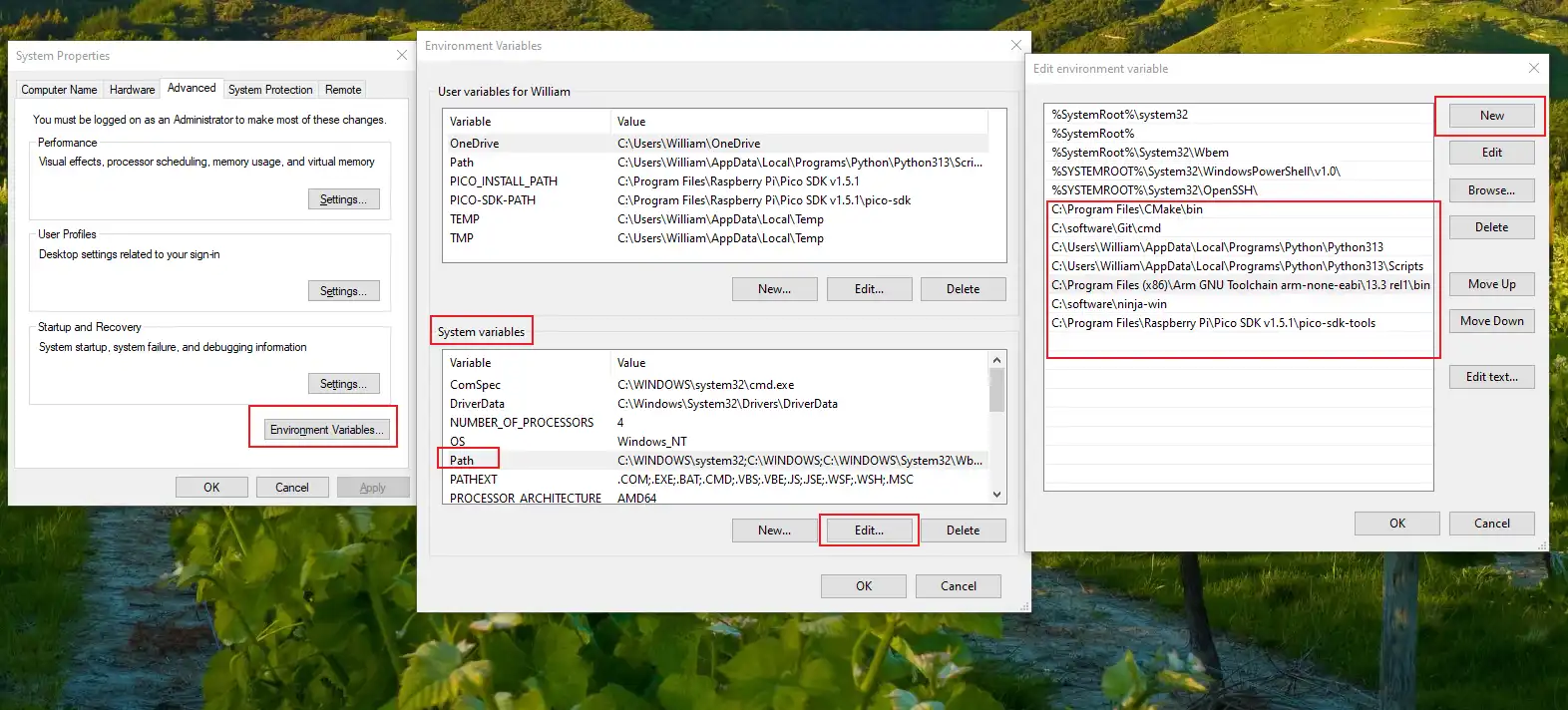
Ads PATH
Build
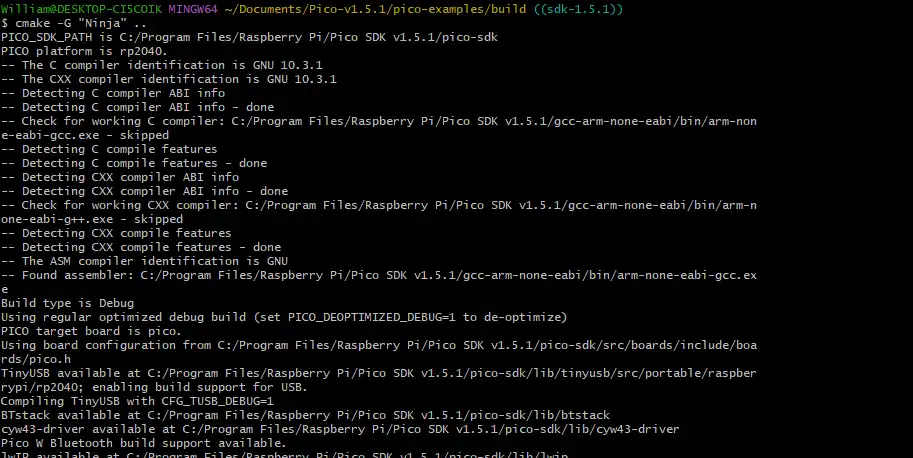
Open git bash, go to the pico-examples/build directory, and execute the following command to build the system
cmake -G "Ninja" ..
ninja

Flash
Press the BOOTSEL key and a USB device will pop up. Copy the compiled .uf2 file to the USB device of RP2040 and wait until the USB device disappears, then the programme will start to execute.
Examples
RP2040 Control the 40-PIN
- GPIO
- I2C
- MCP2515
- PWM
- PoE FAN
- UART
GPIO
Preparation
- One Radxa X4
- One LED
Connection
| Radxa X4 | <--> | LED |
|---|---|---|
| PIN_5 | <--> | LED |
| PIN_1 | <--> | VCC |
| PIN_9 | <--> | GND |
Here PIN_5 corresponds to GPIO29 in the following code, please refer to GPIO Definition for details.
Test
-
Replace pico-examples/blink/blink.c with the following code
blink.c
#include "pico/stdlib.h"
#define BLINK_PIN 29 // GPIO29
int main() {
gpio_init(BLINK_PIN);
gpio_set_dir(BLINK_PIN, GPIO_OUT);
while (true) {
gpio_put(BLINK_PIN, 1);
sleep_ms(250);
gpio_put(BLINK_PIN, 0);
sleep_ms(250);
}
} -
Compile
cd pico-examples/build/
rm -rf *
cmake -G "Ninja" ..
ninjaAfter successful compilation, a file named blink.uf2 will be created in the pico-examples/build/blink/ directory.
-
Flash
- Reboot RP2040
-
Drag the blink.uf2 file into the RP2040, and when the RP2040 disappears, the LED will start blinking.
I2C
Preparation
- One Radxa X4
- One I2C OLED 1306
Connection
| Radxa X4 | <--> | OLED |
|---|---|---|
| PIN_5 | <--> | SCL |
| PIN_3 | <--> | SDA |
| PIN_1 | <--> | VCC |
| PIN_9 | <--> | GND |
Here PIN_5 corresponds to I2C0 SDA for GPIO29 in the following code, and PIN_3 corresponds to I2C0 SCL for GPIO28 in the following code, for details, please refer to GPIO Definition.
Test
- Replace the following code with pico-examples/i2c/lcd_1602_i2c/lcd_1602_i2c.c
lcd_1602_i2c.c
#include <stdio.h>
#include <string.h>
#include "pico/stdlib.h"
#include "hardware/i2c.h"
#include "pico/binary_info.h"
#define I2C_ID i2c0
#define I2C_SDA_PIN 28
#define I2C_SCL_PIN 29
// commands
const int LCD_CLEARDISPLAY = 0x01;
const int LCD_RETURNHOME = 0x02;
const int LCD_ENTRYMODESET = 0x04;
const int LCD_DISPLAYCONTROL = 0x08;
const int LCD_CURSORSHIFT = 0x10;
const int LCD_FUNCTIONSET = 0x20;
const int LCD_SETCGRAMADDR = 0x40;
const int LCD_SETDDRAMADDR = 0x80;
// flags for display entry mode
const int LCD_ENTRYSHIFTINCREMENT = 0x01;
const int LCD_ENTRYLEFT = 0x02;
// flags for display and cursor control
const int LCD_BLINKON = 0x01;
const int LCD_CURSORON = 0x02;
const int LCD_DISPLAYON = 0x04;
// flags for display and cursor shift
const int LCD_MOVERIGHT = 0x04;
const int LCD_DISPLAYMOVE = 0x08;
// flags for function set
const int LCD_5x10DOTS = 0x04;
const int LCD_2LINE = 0x08;
const int LCD_8BITMODE = 0x10;
// flag for backlight control
const int LCD_BACKLIGHT = 0x08;
const int LCD_ENABLE_BIT = 0x04;
// By default these LCD display drivers are on bus address 0x27
static int addr = 0x27;
// Modes for lcd_send_byte
#define LCD_CHARACTER 1
#define LCD_COMMAND 0
#define MAX_LINES 2
#define MAX_CHARS 16
/* Quick helper function for single byte transfers */
void i2c_write_byte(uint8_t val) {
i2c_write_blocking(I2C_ID, addr, &val, 1, false);
}
void lcd_toggle_enable(uint8_t val) {
// Toggle enable pin on LCD display
// We cannot do this too quickly or things don't work
#define DELAY_US 600
sleep_us(DELAY_US);
i2c_write_byte(val | LCD_ENABLE_BIT);
sleep_us(DELAY_US);
i2c_write_byte(val & ~LCD_ENABLE_BIT);
sleep_us(DELAY_US);
}
// The display is sent a byte as two separate nibble transfers
void lcd_send_byte(uint8_t val, int mode) {
uint8_t high = mode | (val & 0xF0) | LCD_BACKLIGHT;
uint8_t low = mode | ((val << 4) & 0xF0) | LCD_BACKLIGHT;
i2c_write_byte(high);
lcd_toggle_enable(high);
i2c_write_byte(low);
lcd_toggle_enable(low);
}
void lcd_clear(void) {
lcd_send_byte(LCD_CLEARDISPLAY, LCD_COMMAND);
}
// go to location on LCD
void lcd_set_cursor(int line, int position) {
int val = (line == 0) ? 0x80 + position : 0xC0 + position;
lcd_send_byte(val, LCD_COMMAND);
}
static void inline lcd_char(char val) {
lcd_send_byte(val, LCD_CHARACTER);
}
void lcd_string(const char *s) {
while (*s) {
lcd_char(*s++);
}
}
void lcd_init() {
lcd_send_byte(0x03, LCD_COMMAND);
lcd_send_byte(0x03, LCD_COMMAND);
lcd_send_byte(0x03, LCD_COMMAND);
lcd_send_byte(0x02, LCD_COMMAND);
lcd_send_byte(LCD_ENTRYMODESET | LCD_ENTRYLEFT, LCD_COMMAND);
lcd_send_byte(LCD_FUNCTIONSET | LCD_2LINE, LCD_COMMAND);
lcd_send_byte(LCD_DISPLAYCONTROL | LCD_DISPLAYON, LCD_COMMAND);
lcd_clear();
}
int main() {
i2c_init(I2C_ID, 100 * 1000);
gpio_set_function(I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(I2C_SDA_PIN);
gpio_pull_up(I2C_SCL_PIN);
// Make the I2C pins available to picotool
bi_decl(bi_2pins_with_func(I2C_SDA_PIN, I2C_SCL_PIN, GPIO_FUNC_I2C));
lcd_init();
static char *message[] =
{
"RP2040 by", "Raspberry Pi",
"A brand new", "microcontroller",
"Twin core M0", "Full C SDK",
"More power in", "your product",
"More beans", "than Heinz!"
};
while (1) {
for (int m = 0; m < sizeof(message) / sizeof(message[0]); m += MAX_LINES) {
for (int line = 0; line < MAX_LINES; line++) {
lcd_set_cursor(line, (MAX_CHARS / 2) - strlen(message[m + line]) / 2);
lcd_string(message[m + line]);
}
sleep_ms(2000);
lcd_clear();
}
}
}
-
Compile
cd pico-examples/build/
rm -rf *
cmake -G "Ninja" ..
ninjaAfter successful compilation, a file named lcd_1602_i2c.uf2 will be created in the pico-examples/build/i2c/lcd_1602_i2c/ directory
-
Flash
- Reboot RP2040
-
Drag the lcd_1602_i2c.uf2 file into the RP2040, and after the RP2040 disappears, the OLED will have a paragraph of text
MCP2515
-
Prepare
-
One Radxa X4
-
One MCP2515 module
-
Connections
| Radxa X4 | <--> | MCP2515 |
|---|---|---|
| PIN_13 | <--> | SPI SCK |
| PIN_11 | <--> | SPI CS |
| PIN_15 | <--> | SPI TX |
| PIN_7 | <--> | SPI RX |
| PIN_1 | <--> | VCC |
| PIN_9 | <--> | GND |
The following program is for loopback test only, so you need to short PIN_H and PIN_L of MCP2515.
- Download the library for MCP2515
cd pico-examples
git clone https://github.com/adamczykpiotr/pico-mcp2515.git
- Adding pico-mcp2515 to the pico-examples compilation
Edit pico-examples/CMakeLists.txt
... ...
add_subdirectory(pico_w)
add_subdirectory(pico-mcp2515)
add_subdirectory(pio)
... ...
- Open the serial port
Edit pico-examples/pico-mcp2515/CMakeLists.txt
pico_enable_stdio_uart(pico-mcp2515 1)
pico_enable_stdio_usb(pico-mcp2515 1)
- Modify the pico-mcp2515/include/mcp2515/mcp2515.h.
Modify the SPI pins according to the connections we made above
For example:
public:
MCP2515(
spi_inst_t* CHANNEL = spi0,
uint8_t CS_PIN = 5,
uint8_t TX_PIN = 3,
uint8_t RX_PIN = 4,
uint8_t SCK_PIN = 6,
uint32_t _SPI_CLOCK = DEFAULT_SPI_CLOCK
);
- Replace pico-examples/pico-mcp2515/src/pico-mcp2515.cpp with the following code
pico-mcp2515.cpp
#include <stdio.h>
#include <string.h>
#include "pico/stdlib.h"
#include "mcp2515/mcp2515.h"
#include "hardware/uart.h"
int main() {
MCP2515 can0;
struct can_frame rx;
struct can_frame tx;
tx.can_id = 0x123;
tx.can_dlc = 8;
tx.data[0] = 0x11;
tx.data[1] = 0x22;
tx.data[2] = 0x33;
tx.data[3] = 0x44;
tx.data[4] = 0x55;
tx.data[5] = 0x66;
tx.data[6] = 0x77;
tx.data[7] = 0x88;
stdio_init_all();
//Initialize interface
can0.reset();
can0.setBitrate(CAN_1000KBPS, MCP_16MHZ);
can0.setLoopbackMode();
// loopback
while(true) {
MCP2515::ERROR result = can0.sendMessage(&tx);
if(result == MCP2515::ERROR_OK) {
printf("CAN TX: sent successfully ...\r\n");
}
sleep_ms(1000);
if(can0.readMessage(&rx) == MCP2515::ERROR_OK) {
for(int i = 0; i < 8; i++) {
printf("CAN RX: data[%d]: 0x%x\r\n", i, rx.data[i]);
}
}
sleep_ms(1000);
}
return 0;
}
-
Compile
cd pico-examples/build
rm -rf *
cmake ..
make -j$(nproc)
After successful compilation, a file named pico-mcp2515.uf2 will be created in the pico-examples/build/pico-mcp2515/ directory.
-
Flash
- Reboot RP2040
-
Drag the pico-mcp2515.uf2 file into the RP2040 and wait for the RP2040 to disappear
-
Verification
Open the serial port /dev/ttyS4, we can see the following printout:
CAN TX: sent successfully ...
CAB RX: data[0]: 0x11
CAB RX: data[1]: 0x22;
CAB RX: data[2]: 0x33;
CAB RX: data[3]: 0x44;
CAB RX: data[4]: 0x55;
CAB RX: data[5]: 0x66;
CAB RX: data[6]: 0x77;
CAB RX: data[7]: 0x88;
PWM
Preparation
- One Radxa X4
- One LED
Connection
| Radxa X4 | <--> | LED |
|---|---|---|
| PIN_5 | <--> | LED |
| PIN_1 | <--> | VCC |
| PIN_9 | <--> | GND |
Here PIN_5 corresponds to GPIO29 in the following code, please refer to GPIO Definition for details.
Test
- Replace the following code with pico-examples/pwm/led_fade/pwm_led_fade.c
pwm_led_fade.c
#include "pico/stdlib.h"
#include <stdio.h>
#include "pico/time.h"
#include "hardware/irq.h"
#include "hardware/pwm.h"
#define PWD_FADE_LED_PIN 29
void on_pwm_wrap() {
static int fade = 0;
static bool going_up = true;
pwm_clear_irq(pwm_gpio_to_slice_num(PWD_FADE_LED_PIN));
if (going_up) {
++fade;
if (fade > 255) {
fade = 255;
going_up = false;
}
} else {
--fade;
if (fade < 0) {
fade = 0;
going_up = true;
}
}
pwm_set_gpio_level(PWD_FADE_LED_PIN, fade * fade);
}
int main() {
gpio_set_function(PWD_FADE_LED_PIN, GPIO_FUNC_PWM);
uint slice_num = pwm_gpio_to_slice_num(PWD_FADE_LED_PIN);
pwm_clear_irq(slice_num);
pwm_set_irq_enabled(slice_num, true);
irq_set_exclusive_handler(PWM_IRQ_WRAP, on_pwm_wrap);
irq_set_enabled(PWM_IRQ_WRAP, true);
pwm_config config = pwm_get_default_config();
pwm_config_set_clkdiv(&config, 4.f);
pwm_init(slice_num, &config, true);
while (1)
tight_loop_contents();
}
-
Compile
cd pico-examples/build/
rm -rf *
cmake -G "Ninja" ..
ninjaAfter successful compilation, a file named pwm_led_fade.uf2 will be created in the pico-examples/build/pwm/led_fade/ directory.
-
Flash
- Reboot RP2040
-
Drag the pwm_led_fade.uf2 file into the RP2040, after the RP2040 disappears, the LED will fade from dark to light/bright to dark.
PoE FAN
Preparations
- One Radxa X4
- One Radxa 25W PoE+ HAT for X4
Connection
Install Radxa 25W PoE+ HAT for X4 on Radxa X4 as shown:
Test
- Replace pico-examples/pio/onewire/onewire.c with the following code
onewire.c
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/binary_info.h"
#include "onewire_library.h" // onewire library functions
#include "ow_rom.h" // onewire ROM command codes
#include "ds18b20.h" // ds18b20 function codes
#define FAN_PIN 13
#define TEMP_THRESHOLD 45.0
#define CONVERSION_DELAY_MS 750 // DS18B20 conversion time is about 750ms
#define SLEEP_BETWEEN_READS_MS 1000 // Delay between consecutive temperature reads
int main() {
stdio_init_all();
PIO pio = pio0;
uint gpio = 4;
// configure PIN 13
gpio_init(FAN_PIN);
gpio_set_dir(FAN_PIN, GPIO_OUT);
OW ow;
uint offset;
if (pio_can_add_program(pio, &onewire_program)) {
offset = pio_add_program(pio, &onewire_program);
if (ow_init(&ow, pio, offset, gpio)) {
int maxdevs = 10;
uint64_t romcode[maxdevs];
int num_devs = ow_romsearch(&ow, romcode, maxdevs, OW_SEARCH_ROM);
printf("Found %d devices\n", num_devs);
for (int i = 0; i < num_devs; i++) {
printf("\t%d: 0x%llx\n", i, romcode[i]);
}
while (true) {
// start temperature conversion in parallel on all devices
ow_reset(&ow);
ow_send(&ow, OW_SKIP_ROM);
ow_send(&ow, DS18B20_CONVERT_T);
// wait for the conversion to finish
sleep_ms(CONVERSION_DELAY_MS);
for (int i = 0; i < num_devs; i++) {
ow_reset(&ow);
ow_send(&ow, OW_MATCH_ROM);
for (int b = 0; b < 64; b += 8) {
ow_send(&ow, romcode[i] >> b);
}
ow_send(&ow, DS18B20_READ_SCRATCHPAD);
int16_t temp = ow_read(&ow) | (ow_read(&ow) << 8);
float temperature = temp / 16.0;
// set fan speed to max
if (temperature >= TEMP_THRESHOLD) {
printf("\tTemperature >= 45, Device %d: temp: %.2f\n", i, temperature);
gpio_put(FAN_PIN, 0);
} else {
// set fan speed to min
printf("\tTemperature < 45, Device %d: temp: %.2f\n", i, temperature);
gpio_put(FAN_PIN, 1);
}
}
// sleep between consecutive reads
sleep_ms(SLEEP_BETWEEN_READS_MS);
}
} else {
puts("could not initialise the driver");
}
} else {
puts("could not add the program");
}
return 0;
}
-
compile
cd pico-examples/build/
rm -rf *
cmake -G "Ninja" ..
ninja
After successful compilation, a file named pio_onwire.uf2 will be generated in the pico-examples/build/pio/onewire/ directory.
-
Flash
- Reboot RP2040
-
Drag the pio_onwire.uf2 file into the RP2040, after the RP2040 disappears, the program will start to execute, if the PoE temperature is greater than or equal to 45 degree Celsius, the fan will spin at full speed, otherwise the fan will stop.
UART
- Replace pico-examples/uart/hello_uart/hello_uart.c with the following code
hello_uart.c
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdio.h>
#include "pico/stdlib.h"
#include "hardware/uart.h"
/// \tag::hello_uart[]
#define UART_ID uart0
#define BAUD_RATE 115200
// We are using pins 0 and 1, but see the GPIO function select table in the
// datasheet for information on which other pins can be used.
#define UART_TX_PIN 0
#define UART_RX_PIN 1
int main() {
// Set up our UART with the required speed.
uart_init(UART_ID, BAUD_RATE);
// Set the TX and RX pins by using the function select on the GPIO
// Set datasheet for more information on function select
gpio_set_function(UART_TX_PIN, GPIO_FUNC_UART);
gpio_set_function(UART_RX_PIN, GPIO_FUNC_UART);
// Use some the various UART functions to send out data
// In a default system, printf will also output via the default UART
// Send out a character without any conversions
uart_putc_raw(UART_ID, 'A');
// Send out a character but do CR/LF conversions
uart_putc(UART_ID, 'B');
// Send out a string, with CR/LF conversions
while(1) {
uart_puts(UART_ID, "Hello, UART!\r\n");
sleep_ms(1000);
}
}
/// \end::hello_uart[]
- Replace pico-examples/uart/hello_uart/CMakeLists.txt with the following code
CMakeLists.txt
add_executable(hello_uart
hello_uart.c
)
# pull in common dependencies
target_link_libraries(hello_uart pico_stdlib)
# create map/bin/hex file etc.
pico_add_extra_outputs(hello_uart)
# add url via pico_set_program_url
example_auto_set_url(hello_uart)
pico_enable_stdio_usb(hello_uart 1)
pico_enable_stdio_uart(hello_uart 1)
-
Compile
cd pico-examples/build/
rm -rf *
cmake -G "Ninja" ..
ninja
After successful compilation, a file named hello_uart.uf2 will be created in the pico-examples/build/uart/hello_uart/ directory.
-
Flash
- Reboot RP2040
-
Drag the hello_uart.uf2 file into the RP2040, after the RP2040 disappears, the program starts to execute.
-
Enter the following command in the terminal to view the serial port output
sudo minicom -D /dev/ttyS4 -b 115200
- Verification
In minicom, you will see the terminal output the line "Hello, UART!" every second.