40-PIN Functional Testing
GPIO
GPIO Introduction
General Purpose Inputs/Outputs (GPIOs) are non-dedicated digital signal pins on the circuit board of an integrated circuit or electronic circuit (e.g., MCU/MPU) that can be used as inputs or outputs, or both, and can be controlled by software.
Preparations
- One Radxa ROCK 5A
- One LED
Connection
Connecting PIN_3 of Radxa ROCK 5A as shown
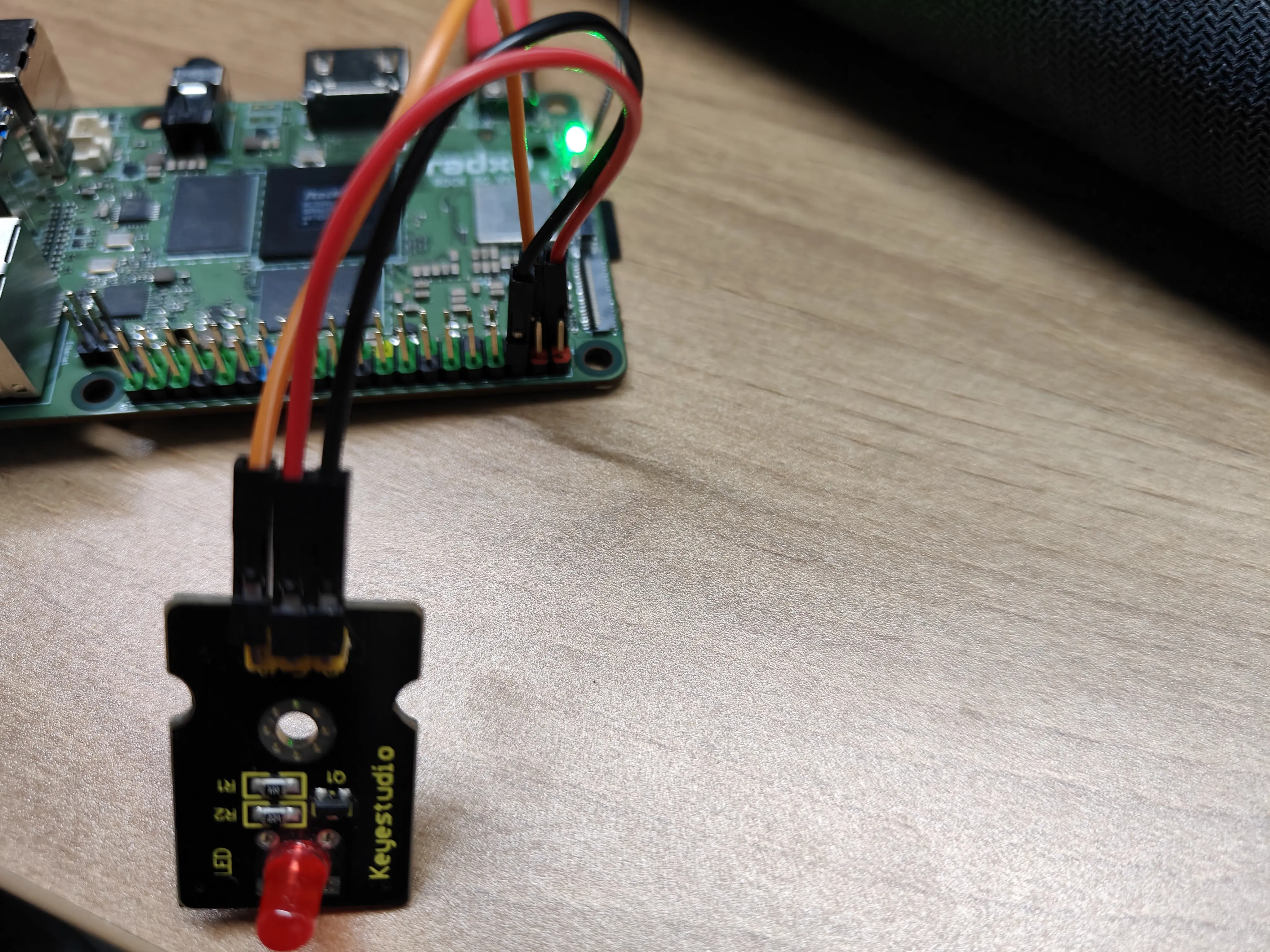
Test
Input Tests
Ground 3 or connect to 3.3V,
radxa@rock-5a:~$ gpioget gpiochip1 31
This command outputs 0 if ground is connected and 1 if 3.3V is connected.
Output Test
radxa@rock-5a:~$ sudo gpioset -m signal $(sudo gpiofind PIN_3)=0 # Output low, Led off radxa@rock-5a:~$ sudo gpioset -m signal $(sudo gpiofind PIN_3)=1 # Output high, Led on
The same GPIO cannot be used by two processes at the same time, otherwise it will indicate resource usage. Therefore, you need to wait for the first command to finish executing before you can execute the second command.
I2C
I2C Introduction
I2C (Inter-Integrated Circuit; pronounced "eye-squared-see" or "eye-two-see"), also known as I2C or IIC, is a synchronous, multi-controller/multi-destination (historically known as master/slave), single-ended, serial communications bus invented by Philips Semiconductors in 1982.
Preparations
- One Radxa ROCK 5A
- One OLED
Enable Overlay
Please refer to Device Tree Configuration to enable I2C Related Overlay, eg: "Enable I2C8-M2".
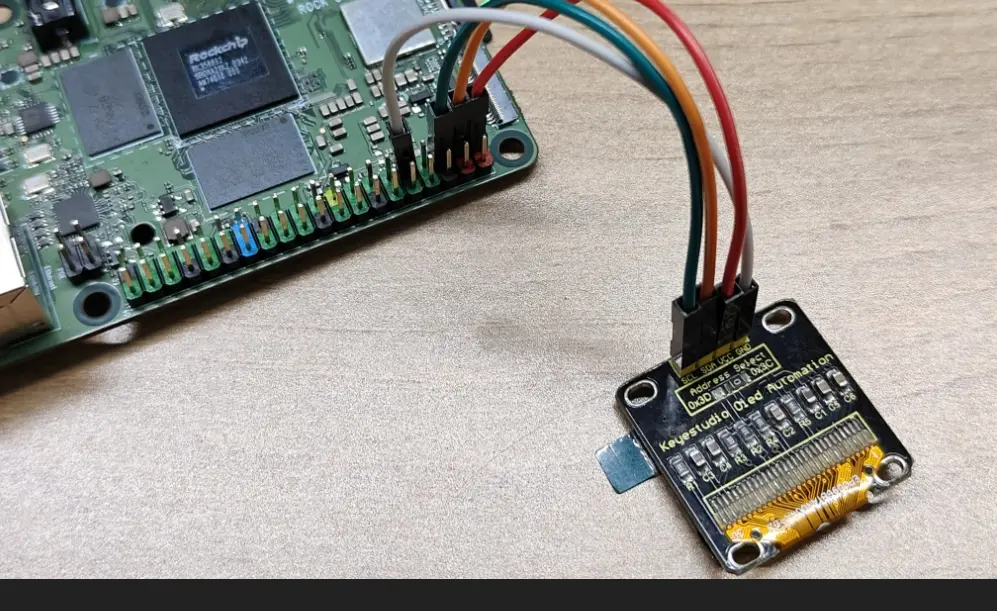
Connection
Connect Radxa ROCK 5A and OLED as follows
| Radxa ROCK 5A | <--> | OLED |
|---|---|---|
| PIN_5 | <--> | SCL |
| PIN_3 | <--> | SDA |
| PIN_1 | <--> | VCC |
| PIN_9 | <--> | GND |
Test
-
Open a terminal and install the Python library python3-periphery by typing the following command in the terminal
-
Create a new Python file called Oled.py and paste the following code into it:
Oled.py
from periphery import I2C
import time
I2C_ADDR = 0x3c
I2C_BUS = "/dev/i2c-8"
i2c = I2C(I2C_BUS)
# SSD1306 init_cmds
init_cmds = [
0xAE, # Display off
0x00, # Set lower column address
0x10, # Set higher column address
0x40, # Set display start line
0xB0, # Set page address
0x81, # Set contrast control
0xCF,
0xA1, # Set segment remap
0xA6, # Normal display
0xA8, # Set multiplex ratio
0x3F,
0xC8, # Set COM output scan direction
0xD3, # Set display offset
0x00,
0xD5, # Set display clock divide ratio/oscillator frequency
0x80,
0xD9, # Set pre-charge period
0xF1,
0xDA, # Set COM pins hardware configuration
0x12,
0xDB, # Set VCOMH deselect level
0x40,
0x8D, # Enable charge pump regulator
0x14,
0xAF # Display on
]
for cmd in init_cmds:
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, cmd])])
def oled_clear():
for page in range(8):
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0xB0 + page])])
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x00])])
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x10])])
for _ in range(128):
i2c.transfer(I2C_ADDR, [I2C.Message([0x40, 0x00])])
char_map = {
"H": [0x00, 0x7F, 0x08, 0x08, 0x08, 0x7F,],
"R": [0x00, 0x7F, 0x09, 0x19, 0x29, 0x46],
"e": [0x00, 0x38, 0x54, 0x54, 0x54, 0x18],
"l": [0x00, 0x00, 0x41, 0x7F, 0x40, 0x00],
"o": [0x00, 0x38, 0x44, 0x44, 0x44, 0x38],
"r": [0x00, 0x7C, 0x08, 0x04, 0x04, 0x08],
"a": [0x00, 0x20, 0x54, 0x54, 0x54, 0x78],
"d": [0x00, 0x38, 0x44, 0x44, 0x48, 0x7F],
"x": [0x00, 0x44, 0x28, 0x10, 0x28, 0x44]
}
def string_to_bytes(string):
bytes_list = []
for char in string:
bytes_list.extend(char_map.get(char, [0x00] * 4))
bytes_list.append(0x00)
return bytes_list
oled_clear()
hello_world_bytes = string_to_bytes("Hello Radxa")
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0xB0])])
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x00])])
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x10])])
for byte in hello_world_bytes:
i2c.transfer(I2C_ADDR, [I2C.Message([0x40, byte])])
i2c.close()
This script is only an example, you need to modify the variable I2C_BUS according to the actual situation.
:::.
- In a terminal, execute the following command to test
sudo python3 Oled.py
After executing the above command, Oled will display the characters "Hello, Radxa".
PWM
PWM Introduction
Pulse Width Modulation (PWM) is a modulation technique that produces variable width pulses to represent the amplitude of an analog input signal. For high amplitude signals, the output switching transistor is on more of the time, while for low amplitude signals, the output switching transistor is off more of the time.
Preparations
- One Radxa ROCK 5A
- One LED
Enable Overlay
Please refer to DeviceTree configuration to enable PWM-related Overlay.
eg: "Enable PWM0_M2.
Connection
As shown in the picture,connect Radxa ROCK 5A's 23
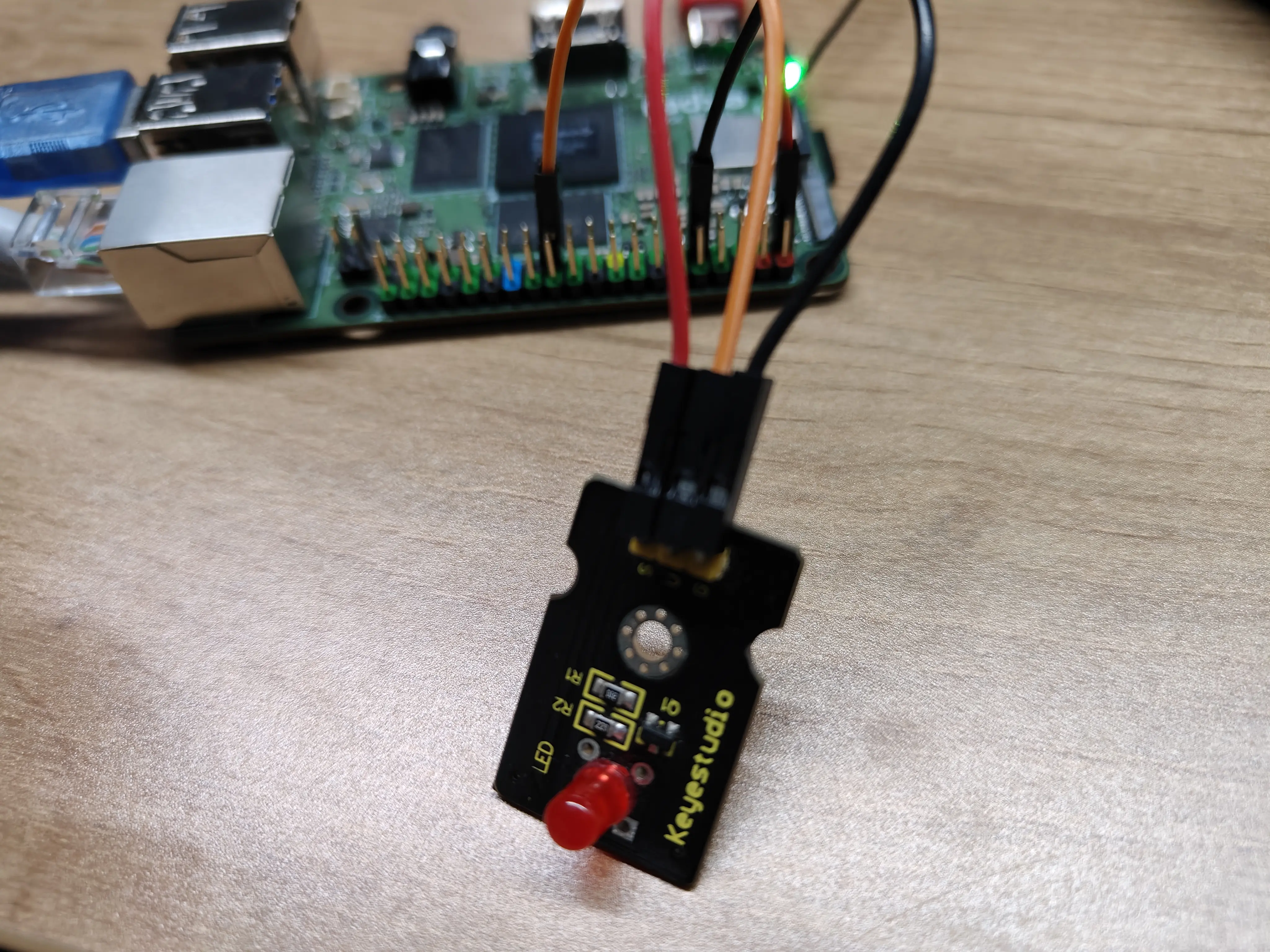
Test
- Open a terminal and install the Python library for python3-periphery by typing the following command in the terminal
sudo apt-get install python3-periphery
- Create a new Python file called Pwm_led_test.py and paste the following code into the file:
Pwm_led_test.py
#!/usr/bin/env python3
# -- encoding: utf-8 --
from periphery import PWM
import time
step = 0.05
Range = int(1/0.05)
pwmchip = int(input("pwmchip:"))
channel = int(input("channel:"))
pwm = PWM(pwmchip, channel)
try:
pwm.frequency = 1e3
pwm.duty_cycle = 0.00
pwm.enable()
while True:
for i in range(0,Range):
time.sleep(step)
pwm.duty_cycle = round(pwm.duty_cycle+step,2)
if pwm.duty_cycle == 1.5:
time.sleep(1.5)
for i in range(0,Range):
time.sleep(step)
pwm.duty_cycle = round(pwm.duty_cycle-step,2)
except:
print("Error !\n")
finally:
pwm.duty_cycle = 1.0
pwm.close()
- In a terminal, execute the following command to test
radxa@rock-5a:~$ sudo python3 Pwm_led_test.py pwmchip:0 channel:0
After executing the above commands, Led will have a gradient effect (dark to light, light to dark).
SPI
Introduction to SPI
The Serial Peripheral Interface (SPI) is the de facto standard for synchronous serial communication (there are many variants), primarily used for short-range wired communication between integrated circuits in embedded systems.
Preparation
- One rock-5a
- One female-to-female Dupont wire
Enable Overlay
Please refer to
Device Tree configuration Enable SPIDEV Related Overlay, eg: "Enable spidev on SPI0-M2 over CS0"。
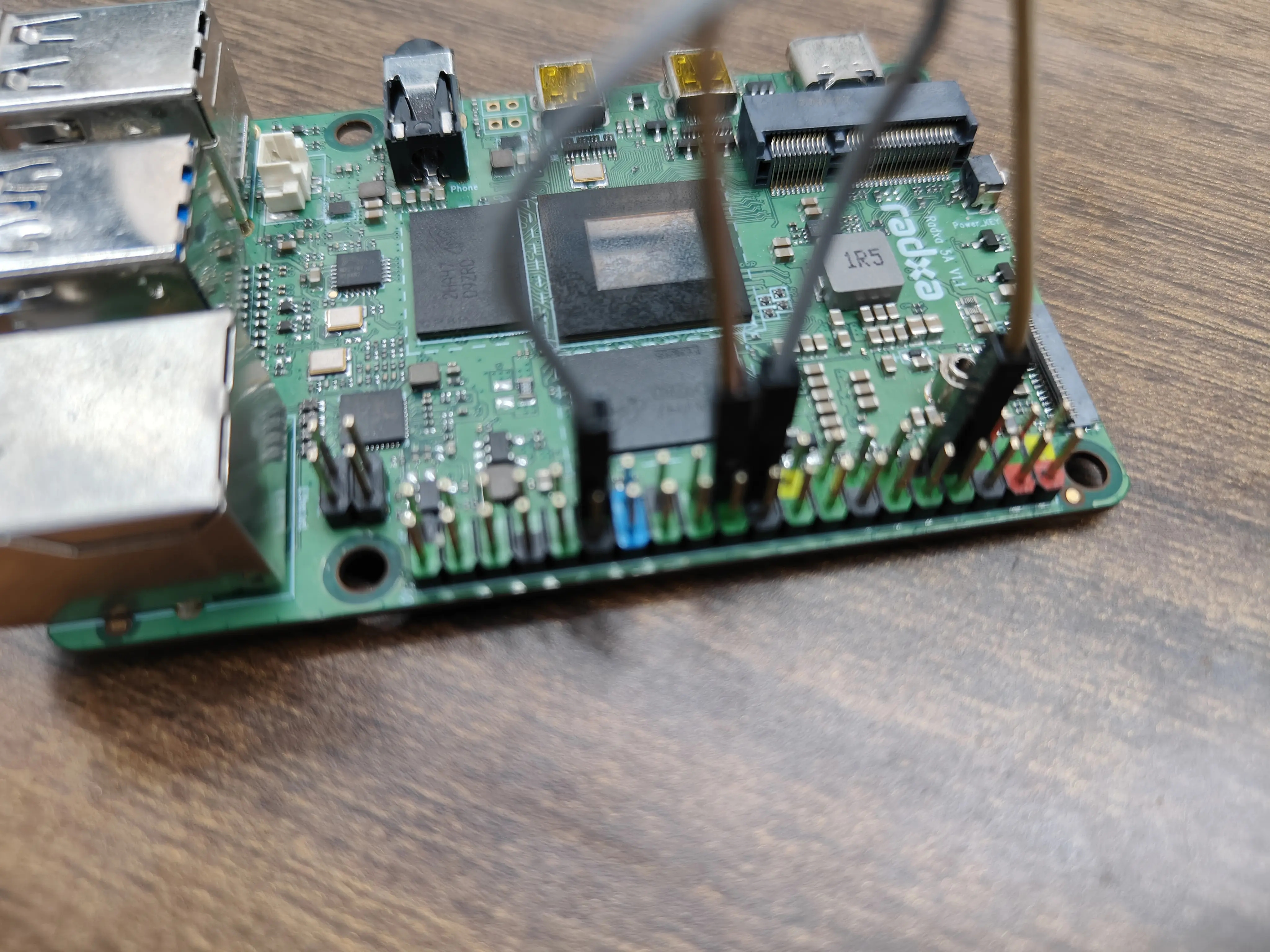
Connection
Short 29 and 31 as shown

Test
- Open a terminal and enter the following command in the terminal to install the compilation tool
sudo apt-get install build-essential
- Create a new C file called spidev_test.c and paste the following code into the file:
spidev_test.c
/*
* SPI testing utility (using spidev driver)
*
* Copyright (c) 2007 MontaVista Software, Inc.
* Copyright (c) 2007 Anton Vorontsov <[email protected]>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License.
*
* Cross-compile with cross-gcc -I/path/to/cross-kernel/include
*/
#include <stdint.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <getopt.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/ioctl.h>
#include <sys/stat.h>
#include <linux/types.h>
#include <linux/spi/spidev.h>
#define ARRAY_SIZE(a) (sizeof(a) / sizeof((a)[0]))
static void pabort(const char *s)
{
perror(s);
abort();
}
static const char *device = "/dev/spidev0.0";
static uint32_t mode;
static uint8_t bits = 8;
static char *input_file;
static char *output_file;
static uint32_t speed = 500000;
static uint16_t delay;
static int verbose;
uint8_t default_tx[] = {
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0x40, 0x00, 0x00, 0x00, 0x00, 0x95,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xF0, 0x0D,
};
uint8_t default_rx[ARRAY_SIZE(default_tx)] = {0, };
char *input_tx;
static void hex_dump(const void *src, size_t length, size_t line_size,
char *prefix)
{
int i = 0;
const unsigned char *address = src;
const unsigned char *line = address;
unsigned char c;
printf("%s | ", prefix);
while (length-- > 0) {
printf("%02X ", *address++);
if (!(++i % line_size) || (length == 0 && i % line_size)) {
if (length == 0) {
while (i++ % line_size)
printf("__ ");
}
printf(" | "); /* right close */
while (line < address) {
c = *line++;
printf("%c", (c < 33 || c == 255) ? 0x2E : c);
}
printf("\n");
if (length > 0)
printf("%s | ", prefix);
}
}
}
/*
* Unescape - process hexadecimal escape character
* converts shell input "\x23" -> 0x23
*/
static int unescape(char *_dst, char *_src)
{
int ret = 0;
int match;
char *src = _src;
char *dst = _dst;
unsigned int ch;
while (*src) {
if (*src == '\\' && *(src+1) == 'x') {
match = sscanf(src + 2, "%2x", &ch);
if (!match)
pabort("malformed input string");
src += 4;
*dst++ = (unsigned char)ch;
} else {
*dst++ = *src++;
}
ret++;
}
return ret;
}
static void transfer(int fd, uint8_t const *tx, uint8_t const *rx, size_t len)
{
int ret;
int out_fd;
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = delay,
.speed_hz = speed,
.bits_per_word = bits,
};
if (mode & SPI_TX_QUAD)
tr.tx_nbits = 4;
else if (mode & SPI_TX_DUAL)
tr.tx_nbits = 2;
if (mode & SPI_RX_QUAD)
tr.rx_nbits = 4;
else if (mode & SPI_RX_DUAL)
tr.rx_nbits = 2;
if (!(mode & SPI_LOOP)) {
if (mode & (SPI_TX_QUAD | SPI_TX_DUAL))
tr.rx_buf = 0;
else if (mode & (SPI_RX_QUAD | SPI_RX_DUAL))
tr.tx_buf = 0;
}
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1)
pabort("can't send spi message");
if (verbose)
hex_dump(tx, len, 32, "TX");
if (output_file) {
out_fd = open(output_file, O_WRONLY | O_CREAT | O_TRUNC, 0666);
if (out_fd < 0)
pabort("could not open output file");
ret = write(out_fd, rx, len);
if (ret != len)
pabort("not all bytes written to output file");
close(out_fd);
}
if (verbose || !output_file)
hex_dump(rx, len, 32, "RX");
}
static void print_usage(const char *prog)
{
printf("Usage: %s [-DsbdlHOLC3]\n", prog);
puts(" -D --device device to use (default /dev/spidev0.0)\n"
" -s --speed max speed (Hz)\n"
" -d --delay delay (usec)\n"
" -b --bpw bits per word\n"
" -i --input input data from a file (e.g. \"test.bin\")\n"
" -o --output output data to a file (e.g. \"results.bin\")\n"
" -l --loop loopback\n"
" -H --cpha clock phase\n"
" -O --cpol clock polarity\n"
" -L --lsb least significant bit first\n"
" -C --cs-high chip select active high\n"
" -3 --3wire SI/SO signals shared\n"
" -v --verbose Verbose (show tx buffer)\n"
" -p Send data (e.g. \"1234\\xde\\xad\")\n"
" -N --no-cs no chip select\n"
" -R --ready slave pulls low to pause\n"
" -2 --dual dual transfer\n"
" -4 --quad quad transfer\n");
exit(1);
}
static void parse_opts(int argc, char *argv[])
{
while (1) {
static const struct option lopts[] = {
{ "device", 1, 0, 'D' },
{ "speed", 1, 0, 's' },
{ "delay", 1, 0, 'd' },
{ "bpw", 1, 0, 'b' },
{ "input", 1, 0, 'i' },
{ "output", 1, 0, 'o' },
{ "loop", 0, 0, 'l' },
{ "cpha", 0, 0, 'H' },
{ "cpol", 0, 0, 'O' },
{ "lsb", 0, 0, 'L' },
{ "cs-high", 0, 0, 'C' },
{ "3wire", 0, 0, '3' },
{ "no-cs", 0, 0, 'N' },
{ "ready", 0, 0, 'R' },
{ "dual", 0, 0, '2' },
{ "verbose", 0, 0, 'v' },
{ "quad", 0, 0, '4' },
{ NULL, 0, 0, 0 },
};
int c;
c = getopt_long(argc, argv, "D:s:d:b:i:o:lHOLC3NR24p:v",
lopts, NULL);
if (c == -1)
break;
switch (c) {
case 'D':
device = optarg;
break;
case 's':
speed = atoi(optarg);
break;
case 'd':
delay = atoi(optarg);
break;
case 'b':
bits = atoi(optarg);
break;
case 'i':
input_file = optarg;
break;
case 'o':
output_file = optarg;
break;
case 'l':
mode |= SPI_LOOP;
break;
case 'H':
mode |= SPI_CPHA;
break;
case 'O':
mode |= SPI_CPOL;
break;
case 'L':
mode |= SPI_LSB_FIRST;
break;
case 'C':
mode |= SPI_CS_HIGH;
break;
case '3':
mode |= SPI_3WIRE;
break;
case 'N':
mode |= SPI_NO_CS;
break;
case 'v':
verbose = 1;
break;
case 'R':
mode |= SPI_READY;
break;
case 'p':
input_tx = optarg;
break;
case '2':
mode |= SPI_TX_DUAL;
break;
case '4':
mode |= SPI_TX_QUAD;
break;
default:
print_usage(argv[0]);
break;
}
}
if (mode & SPI_LOOP) {
if (mode & SPI_TX_DUAL)
mode |= SPI_RX_DUAL;
if (mode & SPI_TX_QUAD)
mode |= SPI_RX_QUAD;
}
}
static void transfer_escaped_string(int fd, char *str)
{
size_t size = strlen(str);
uint8_t *tx;
uint8_t *rx;
tx = malloc(size);
if (!tx)
pabort("can't allocate tx buffer");
rx = malloc(size);
if (!rx)
pabort("can't allocate rx buffer");
size = unescape((char *)tx, str);
transfer(fd, tx, rx, size);
free(rx);
free(tx);
}
static void transfer_file(int fd, char *filename)
{
ssize_t bytes;
struct stat sb;
int tx_fd;
uint8_t *tx;
uint8_t *rx;
if (stat(filename, &sb) == -1)
pabort("can't stat input file");
tx_fd = open(filename, O_RDONLY);
if (tx_fd < 0)
pabort("can't open input file");
tx = malloc(sb.st_size);
if (!tx)
pabort("can't allocate tx buffer");
rx = malloc(sb.st_size);
if (!rx)
pabort("can't allocate rx buffer");
bytes = read(tx_fd, tx, sb.st_size);
if (bytes != sb.st_size)
pabort("failed to read input file");
transfer(fd, tx, rx, sb.st_size);
free(rx);
free(tx);
close(tx_fd);
}
int main(int argc, char *argv[])
{
int ret = 0;
int fd;
parse_opts(argc, argv);
fd = open(device, O_RDWR);
if (fd < 0)
pabort("can't open device");
/*
* spi mode
*/
ret = ioctl(fd, SPI_IOC_WR_MODE, &mode);
if (ret == -1)
pabort("can't set spi mode");
ret = ioctl(fd, SPI_IOC_RD_MODE, &mode);
if (ret == -1)
pabort("can't get spi mode");
/*
* bits per word
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't set bits per word");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't get bits per word");
/*
* max speed hz
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't set max speed hz");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't get max speed hz");
printf("spi mode: 0x%x\n", mode);
printf("bits per word: %d\n", bits);
printf("max speed: %d Hz (%d KHz)\n", speed, speed/1000);
if (input_tx && input_file)
pabort("only one of -p and --input may be selected");
if (input_tx)
transfer_escaped_string(fd, input_tx);
else if (input_file)
transfer_file(fd, input_file);
else
transfer(fd, default_tx, default_rx, sizeof(default_tx));
close(fd);
return ret;
}
- View added spidev devices
ls /dev/spidev*
- Modify the line
static const char *device = ‘/dev/spidev0.0’;according to the actual spidev device.
For example, if the actual spidev is /dev/spidev1.0, then static const char *device = ‘/dev/spidev1.0’;
- In a terminal, compile by typing the following command
gcc spidev_test.c
- In the terminal, enter the following command to test
sudo ./a.out
- Check the output
If the output is consistent with default_tx (if the output is consistent with the following), then the spi loopback test was successful
spi mode: 0x0
bits per word: 8
max speed: 500000 Hz (500 KHz)
RX | FF FF FF FF FF FF 40 00 00 00 00 95 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF F0 0D | ......@....�..................�.
UART
UART Introduction
A UART (Universal Asynchronous Receiver/Transmitter) is the microchip with programming that controls a computer's interface to its attached serial devices.
Preparation
- One rock-5a
- Two female-to-female DuPont cable
Loopback test
Enable Overlay
Please refer to Device Tree Configuration to enable UART Related Overlay, eg: "Enable UART4-M2".
Connection
As shown in the figure, short the Radxa ROCK 5A UART4-M2's PIN_7 and PIN_29

Test
- Open a terminal and enter the following command in the terminal to set the serial port parameters
radxa@rock-5a:~$ sudo stty -F /dev/ttyS4 speed 115200 cs8 -parenb -cstopb -echo
- In the terminal, enter the following command to send data cyclically
radxa@rock-5a:~$ while true ;do echo "sss" > /dev/ttyS4; sleep 1; done;
- Create a new terminal and enter the following command to receive data
radxa@rock-5a:~$ sudo cat /dev/ttyS4
Transceiver test
Enable Overlay
Please refer to Device Tree Configuration to enable UART Related Overlay, eg: "Enable UART4-M2 and UART6-M1".
Connection
Connect UART4-M2 and UART6-M1 as follows
| UART4-M2 | <--> | UART6-M1 |
|---|---|---|
| PIN_7 | <--> | PIN_21 |
| PIN_29 | <--> | PIN_19 |
As shown:
Test
- Open a terminal and enter the following command in the terminal to set the serial port parameters
radxa@rock-5a:~$ sudo stty -F /dev/ttyS4 speed 115200 cs8 -parenb -cstopb -echo radxa@rock-5a:~$ sudo stty -F /dev/ttyS6 speed 115200 cs8 -parenb -cstopb -echo
- In the terminal, enter the following command to send data cyclically
UART4-M2 i.e ttyS4 as the sender
radxa@rock-5a:~$ sudo stty -F /dev/ttyS4 speed 115200 cs8 -parenb -cstopb -echo
- Create a new terminal and enter the following command to receive data
UART6-M1 i.e ttyS6 as the receiver
radxa@rock-5a:~$ sudo cat /dev/ttyS6
- validate
The test is successful if the sender successfully sends and the receiver successfully receives the character "ssss".
- Swap sender and receiver for cross validation